STM32使用中断方式实现串口通信_stm32串口中断怎么用-程序员宅基地
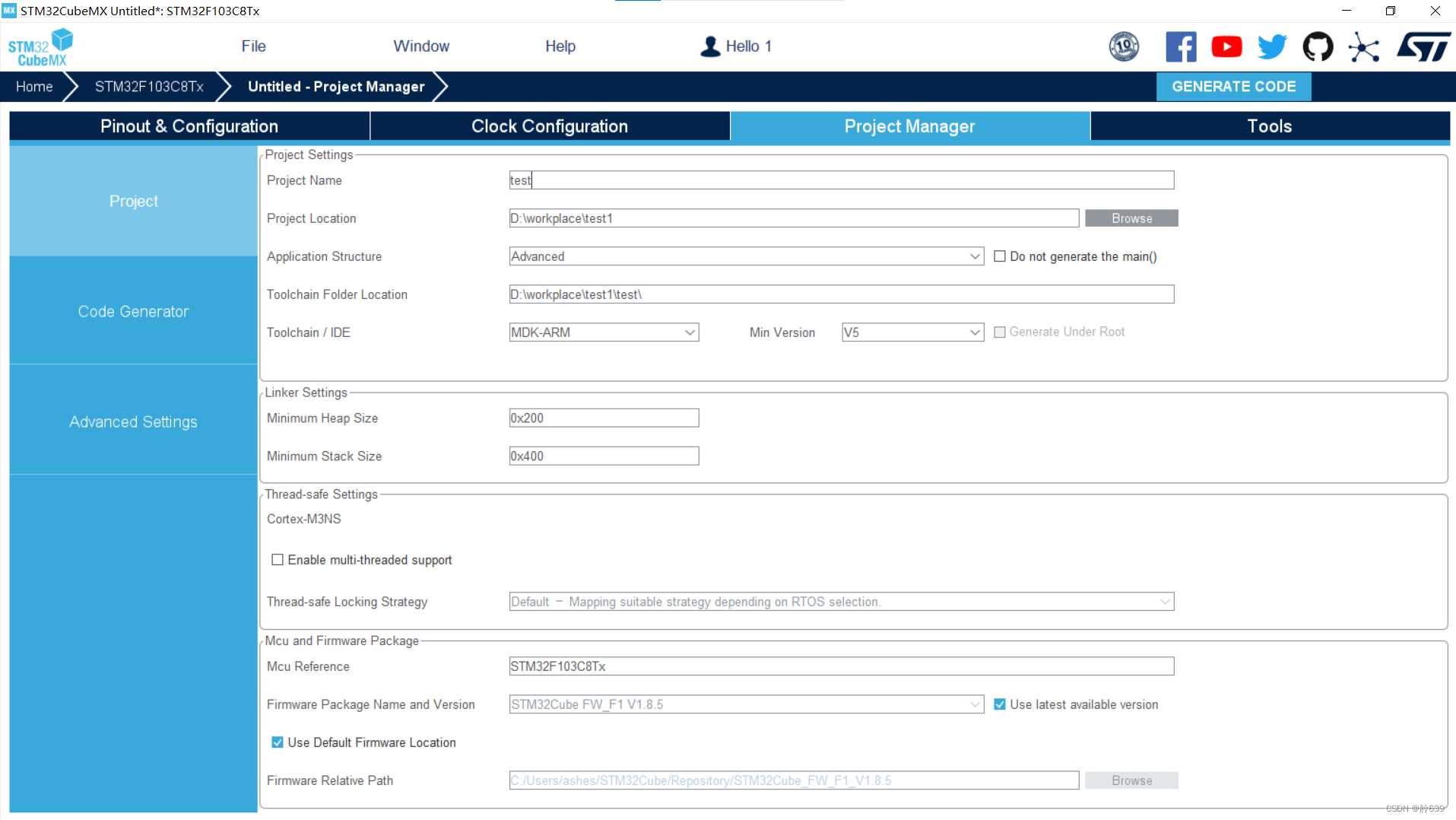
一.在stm32CubeMX内配置项目
项目配置
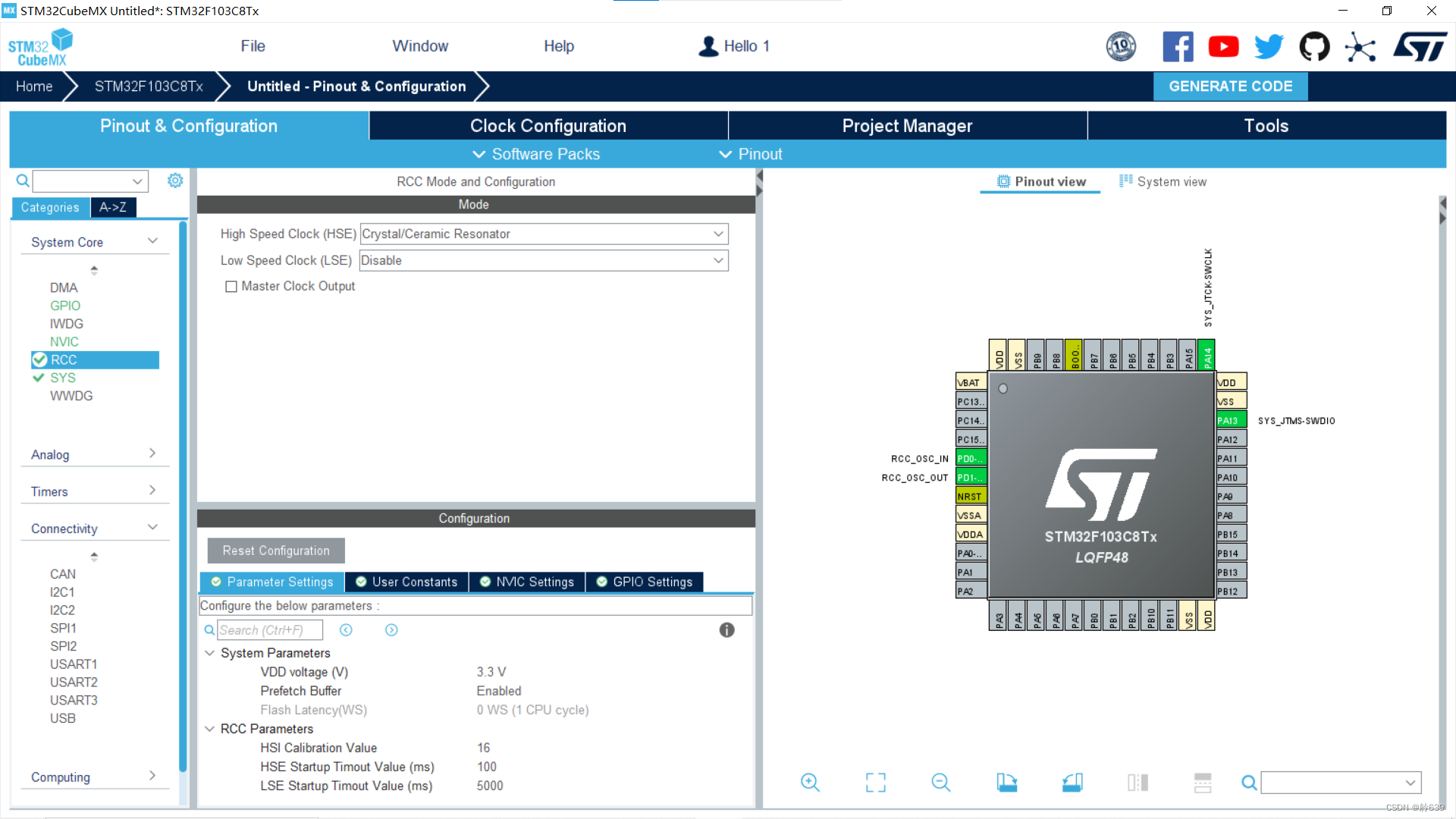
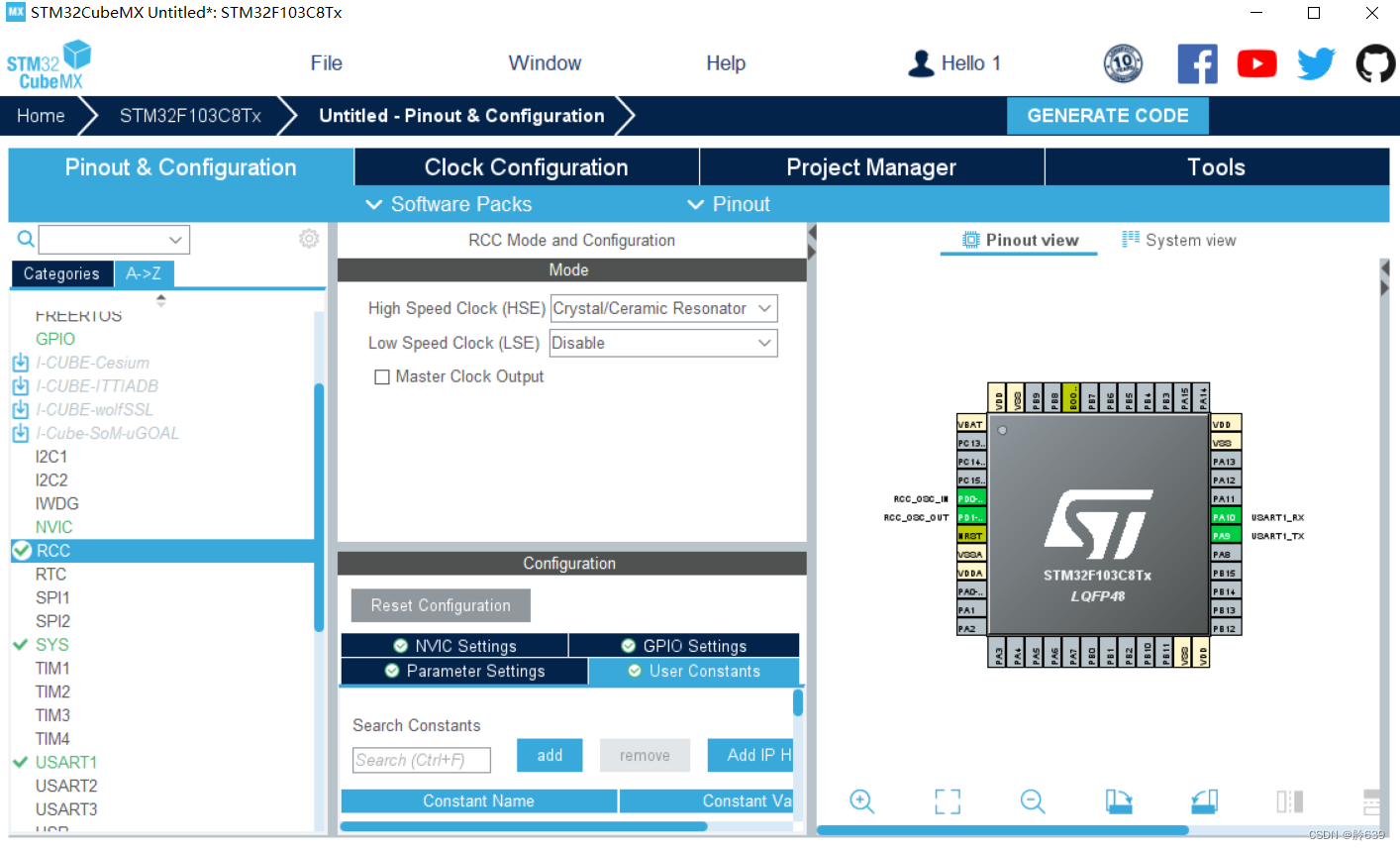
1.设置RCC
HSE选择CCR
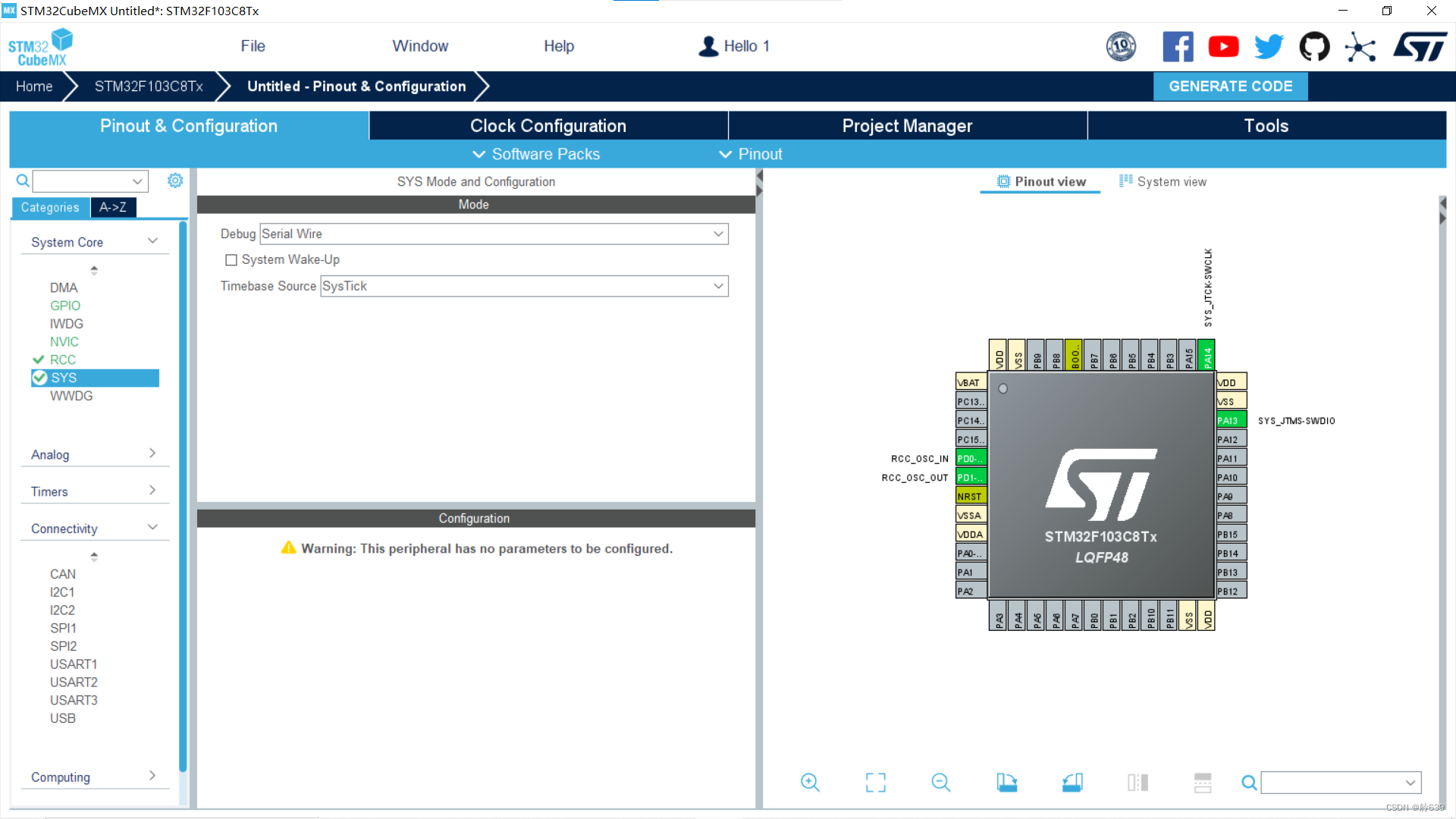
2.设置SYS
Debug选择Seril Wire
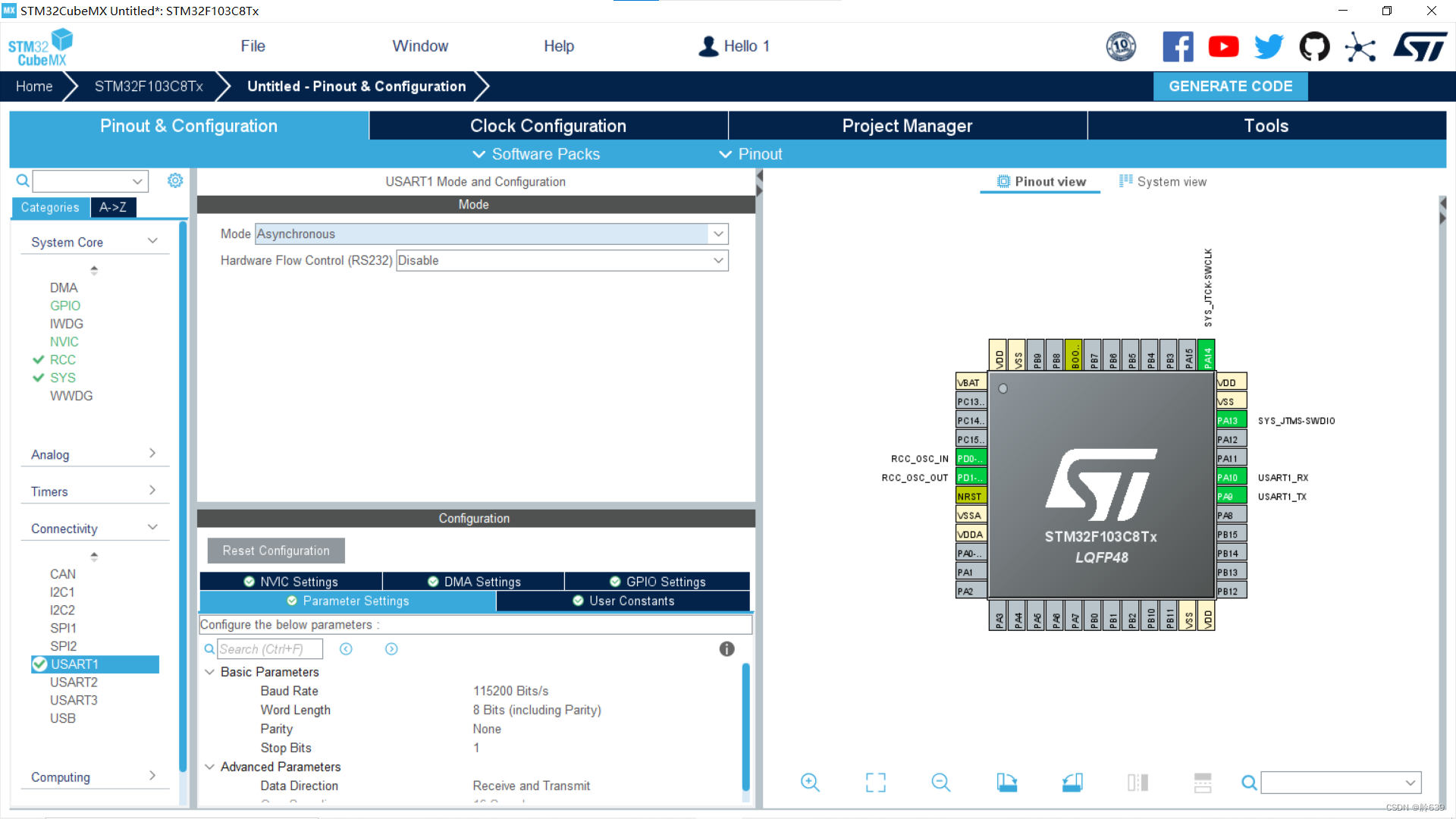
3.设置USART
mode设置为Asynchronous
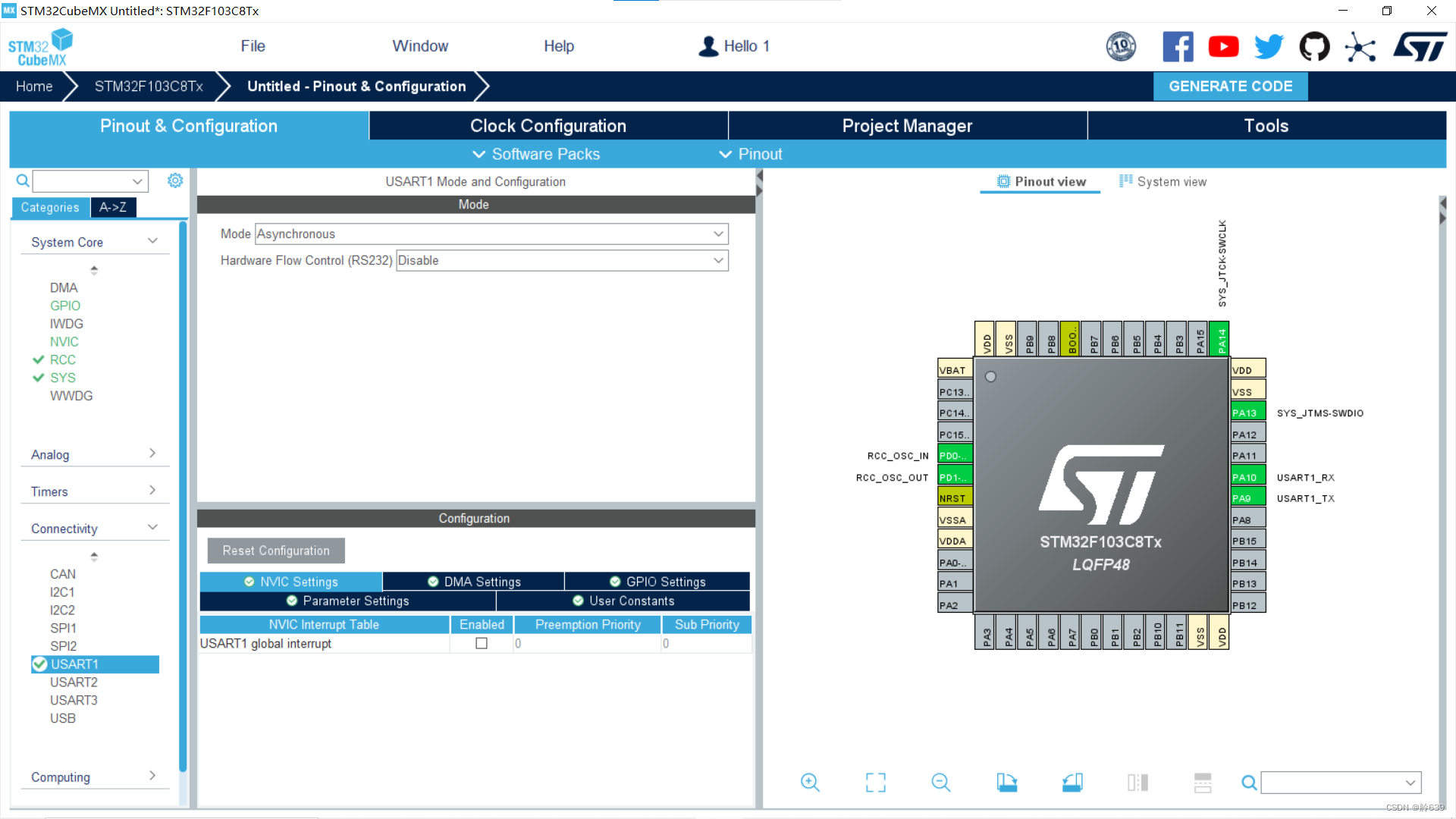
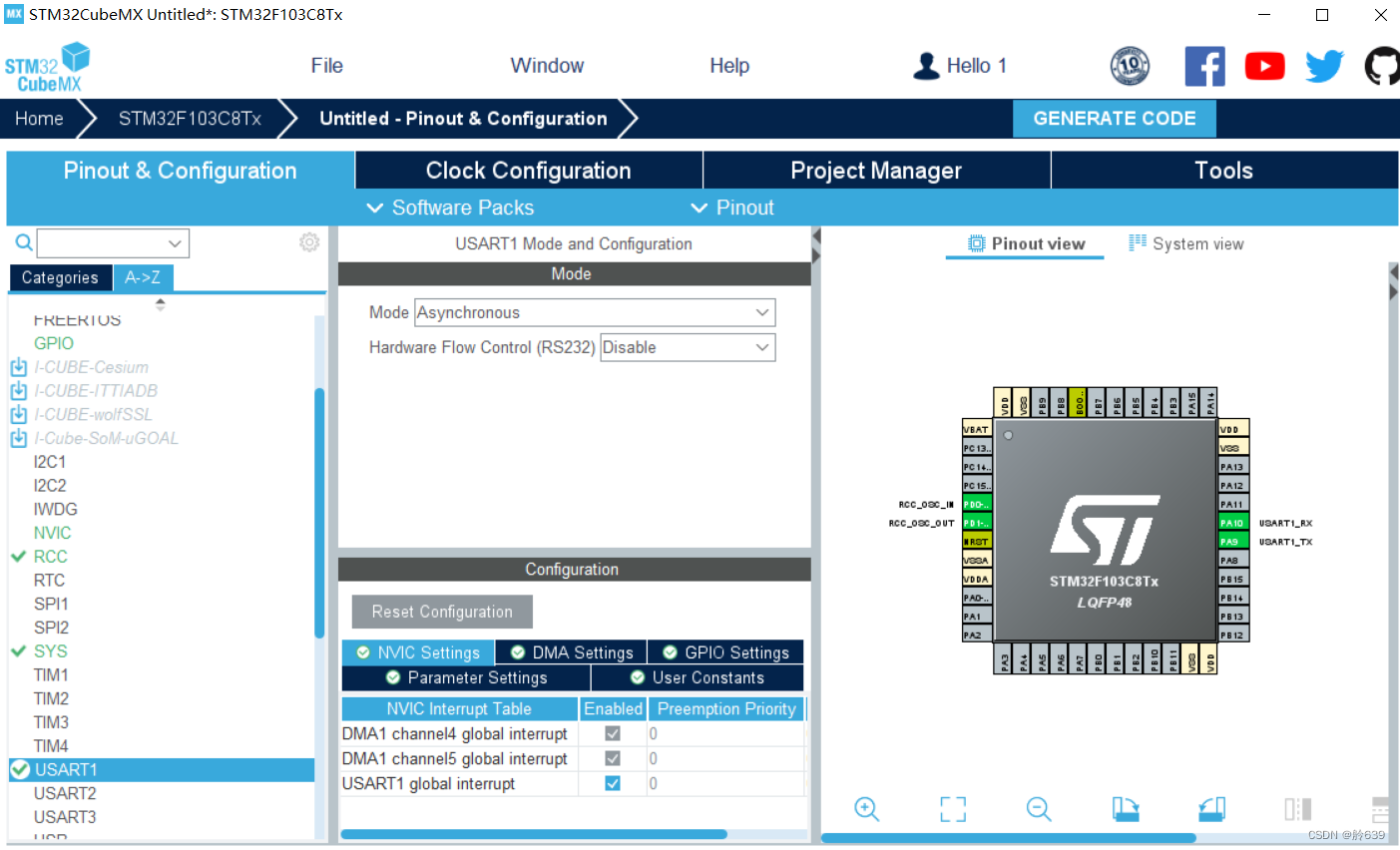
4.设置NVIC
勾选USART1 global interrupt
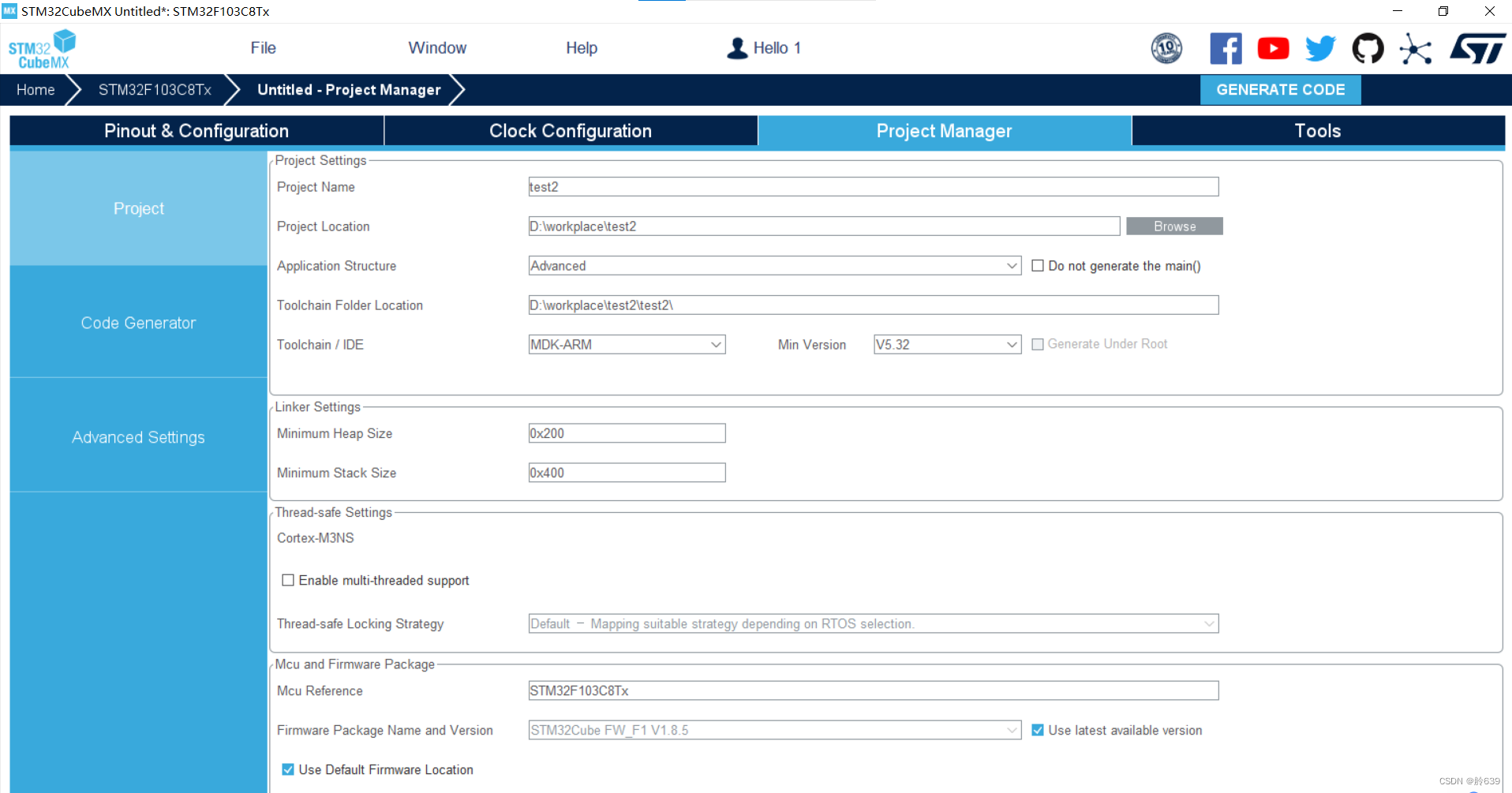
5.创建项目
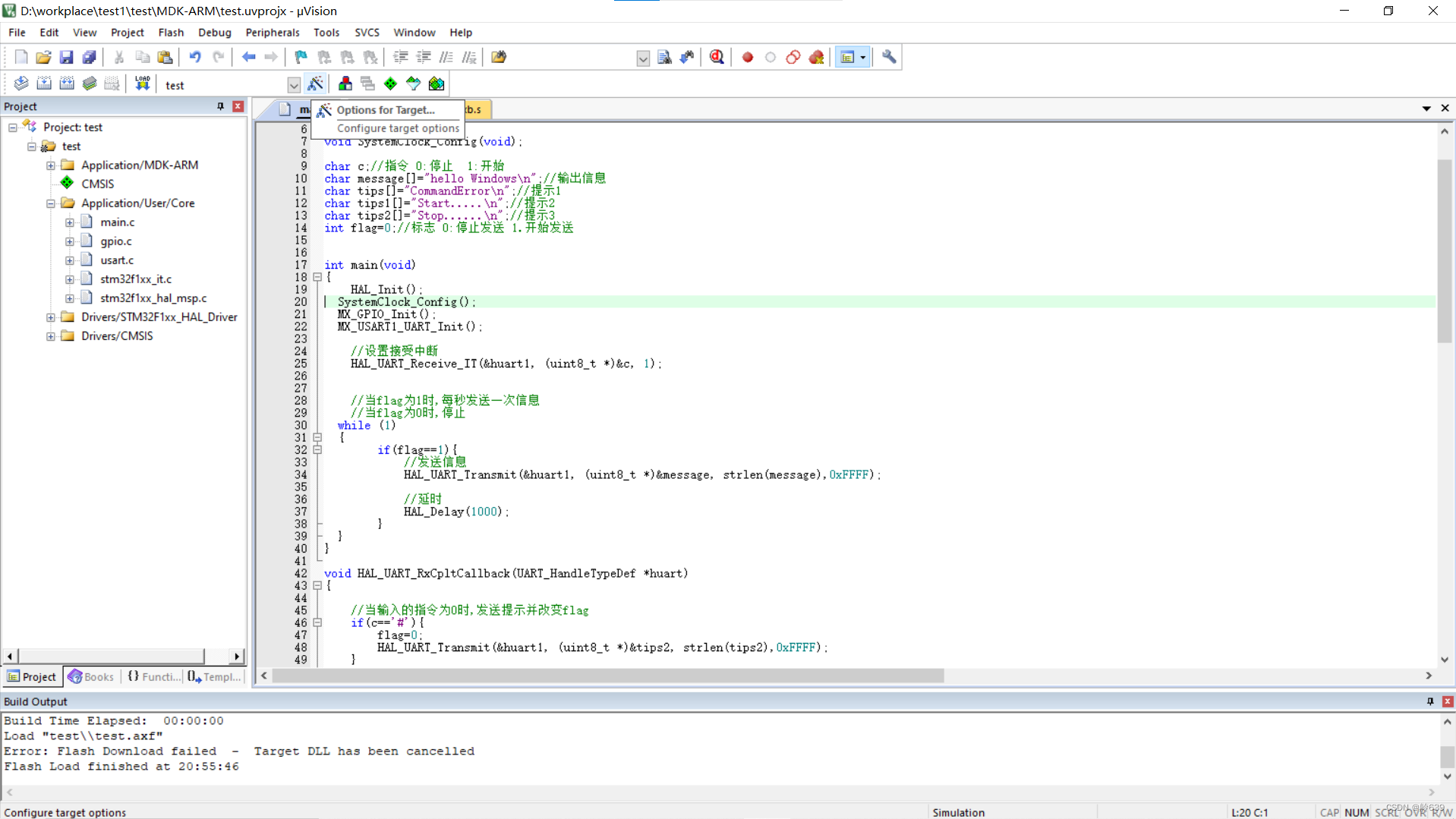
二.代码编写
1.打开项目
2.配置需要的全局变量
char c;//指令 0:停止 1:开始
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
3.设置接收中断
4.main.c内代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include "string.h"
char getBuffer[100];
char value;
char str1[] = "start";
char str2[] = "stop";
char message[]="hello Windows\n";
char tips[]="CommandError\n";
char tips1[]="Start.....\n";
char tips2[]="Stop......\n";
int flag=1;
int countofGetBuffer=0;
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**ep
* @brief The application entry point.
* @retval int
*/
#define COUNTOF(a) (sizeof(a)/sizeof(*(a)))
//jkl
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&value, 1);
//HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 10);
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message,COUNTOF(message),0xFFFF);
//延时
HAL_Delay(1000);
}else if(flag==0){
HAL_Delay(1000);
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart1){
HAL_UART_IRQHandler(huart1);
getBuffer[countofGetBuffer++]=value;
if(strcmp(getBuffer,str1)==0){
flag = 1;
HAL_UART_Transmit(huart1, (uint8_t *)&tips1, COUNTOF(tips1),0xFFFF);
countofGetBuffer = 0;
memset(getBuffer,0,COUNTOF(getBuffer));
}else if(strcmp(getBuffer,str2)==0){
flag = 0;
HAL_UART_Transmit(huart1, (uint8_t *)&tips2, COUNTOF(tips2),0xFFFF);
countofGetBuffer = 0;
memset(getBuffer,0,COUNTOF(getBuffer));
}
//重新设置中断
HAL_UART_Receive_IT(huart1, (uint8_t *)&value,1);
}
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&huart1);
HAL_UART_Receive_IT(&huart1, (uint8_t *)getBuffer,10);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void){
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
三.DMA配置项目
1.设置RCC
2.设置USART1
添加通道,设置异步模式
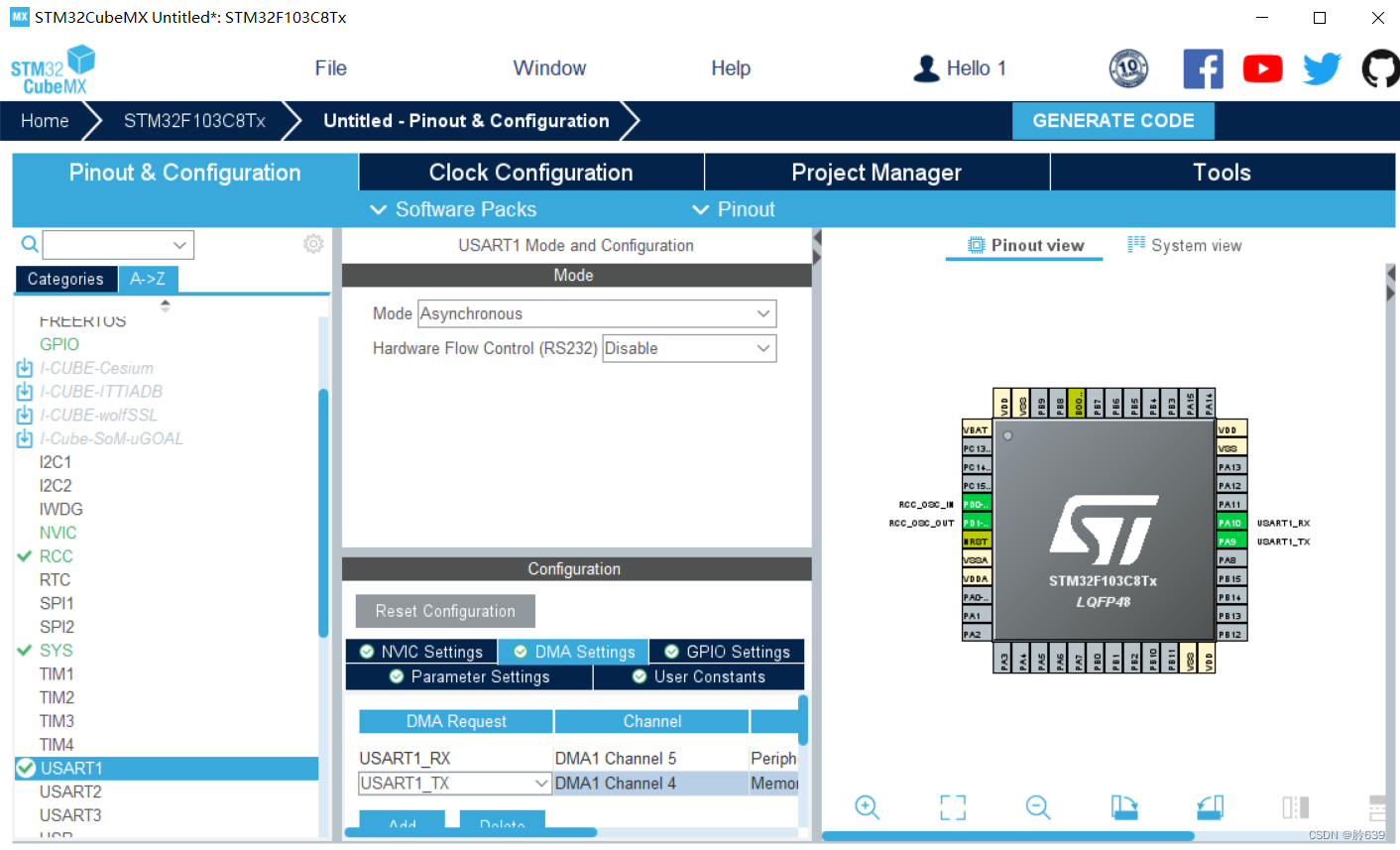
使能串口
2.创建项目
3.代码编写
#include "main.h"
#include "dma.h"
#include "usart.h"
#include "gpio.h"
void SystemClock_Config(void);
uint8_t flag=1;
uint8_t rx_buf[6];//接收串口数据存放的数组
int strEqual(char rcData[6],char rcData2[6])
{
for(uint8_t i = 0 ; i < 6 ; i++){
if (rcData[i] != rcData2[i]) return 0;
}
return 1;
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为“stop!"时,发送提示并改变flag=0
if(strEqual(rx_buf,"stop!"))
{
flag=0;
}
//当输入的指令为"start"时,发送提示并改变flag=1
else if(strEqual(rx_buf,"start"))
{
flag=1;
}
HAL_UART_Receive_DMA(&huart1,(uint8_t*)rx_buf,5);
}
int main(void)
{
HAL_Init();
uint8_t message[] = "hello windows!\n"; //定义数据发送数组
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_DMA(&huart1,(uint8_t*)rx_buf,5);//设置DMA接收到的数据存放在rx_buf中
while (1)
{
if(flag==1)
{
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)message, sizeof(message));
HAL_Delay(600);
}
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
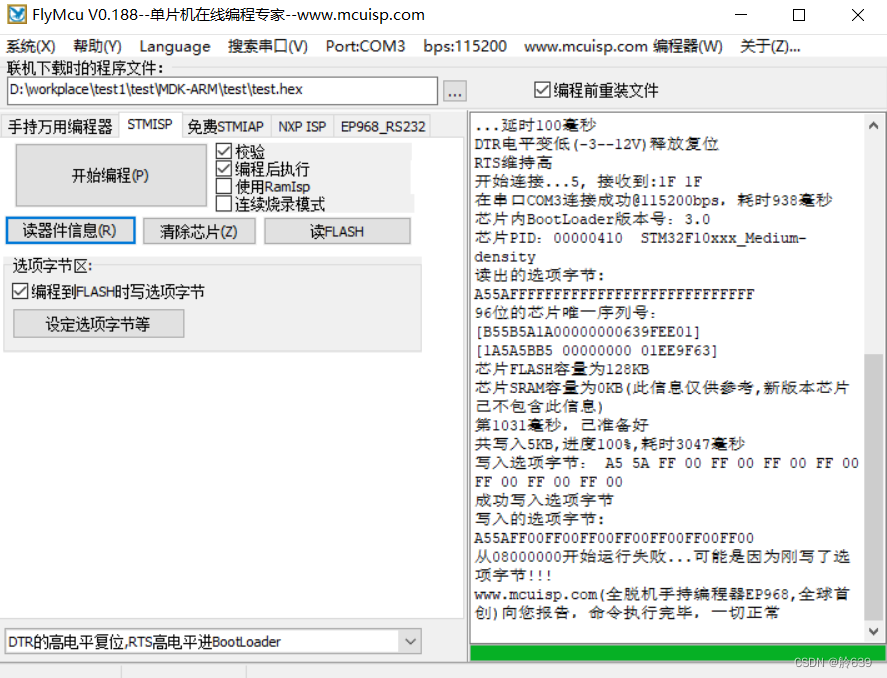
四.编译运行
1.打开flyMCU将程序烧录进单片机
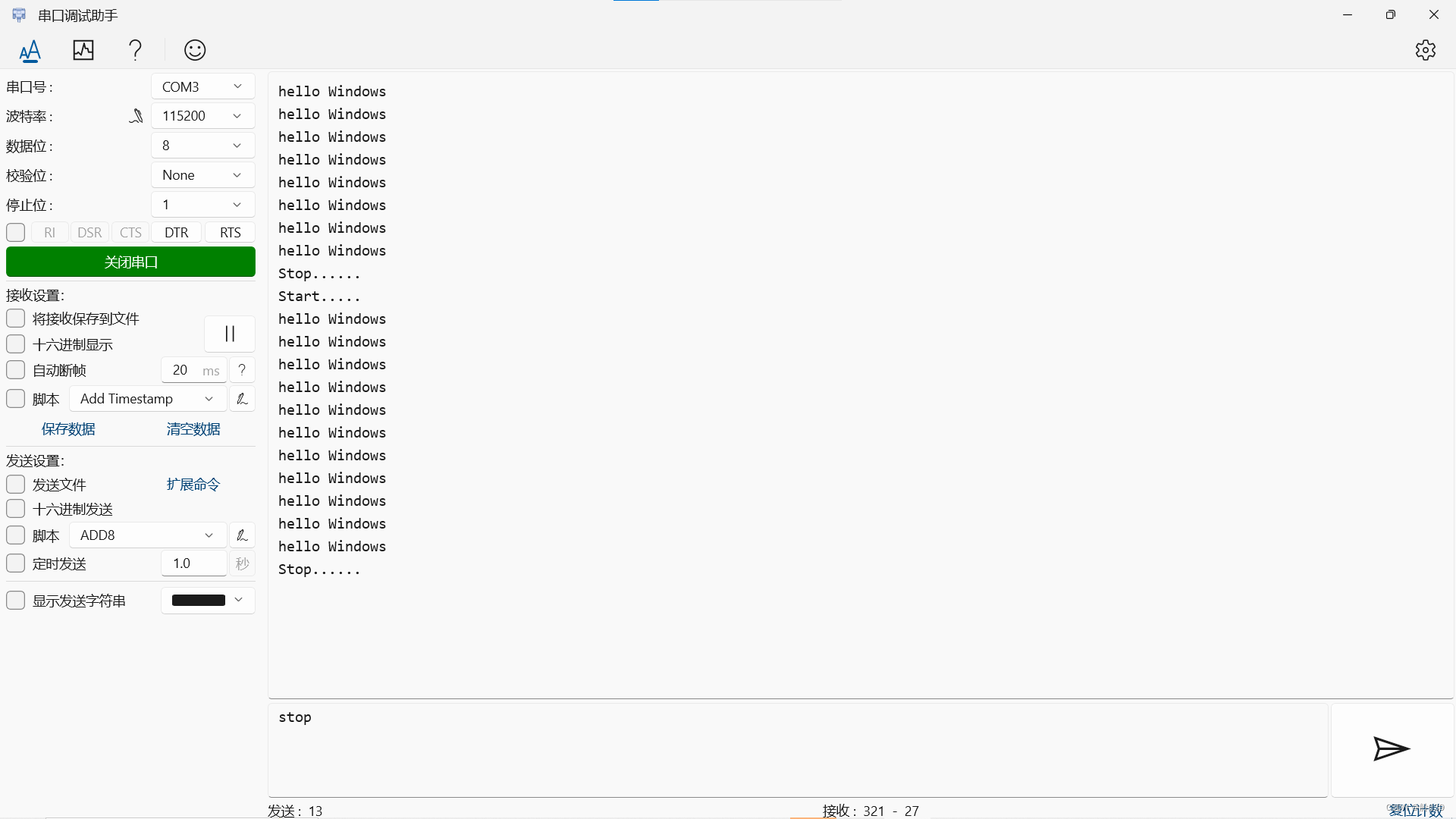
2.打开串口助手查看效果
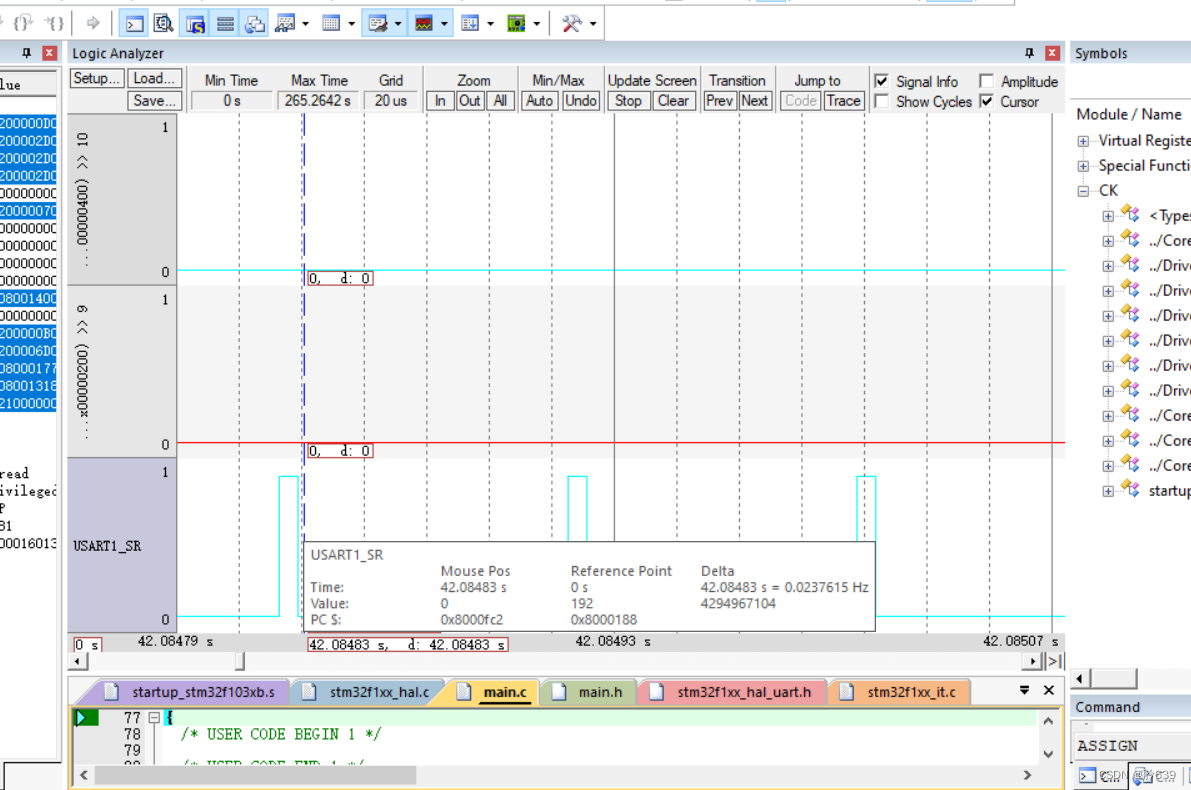
五.观察波形
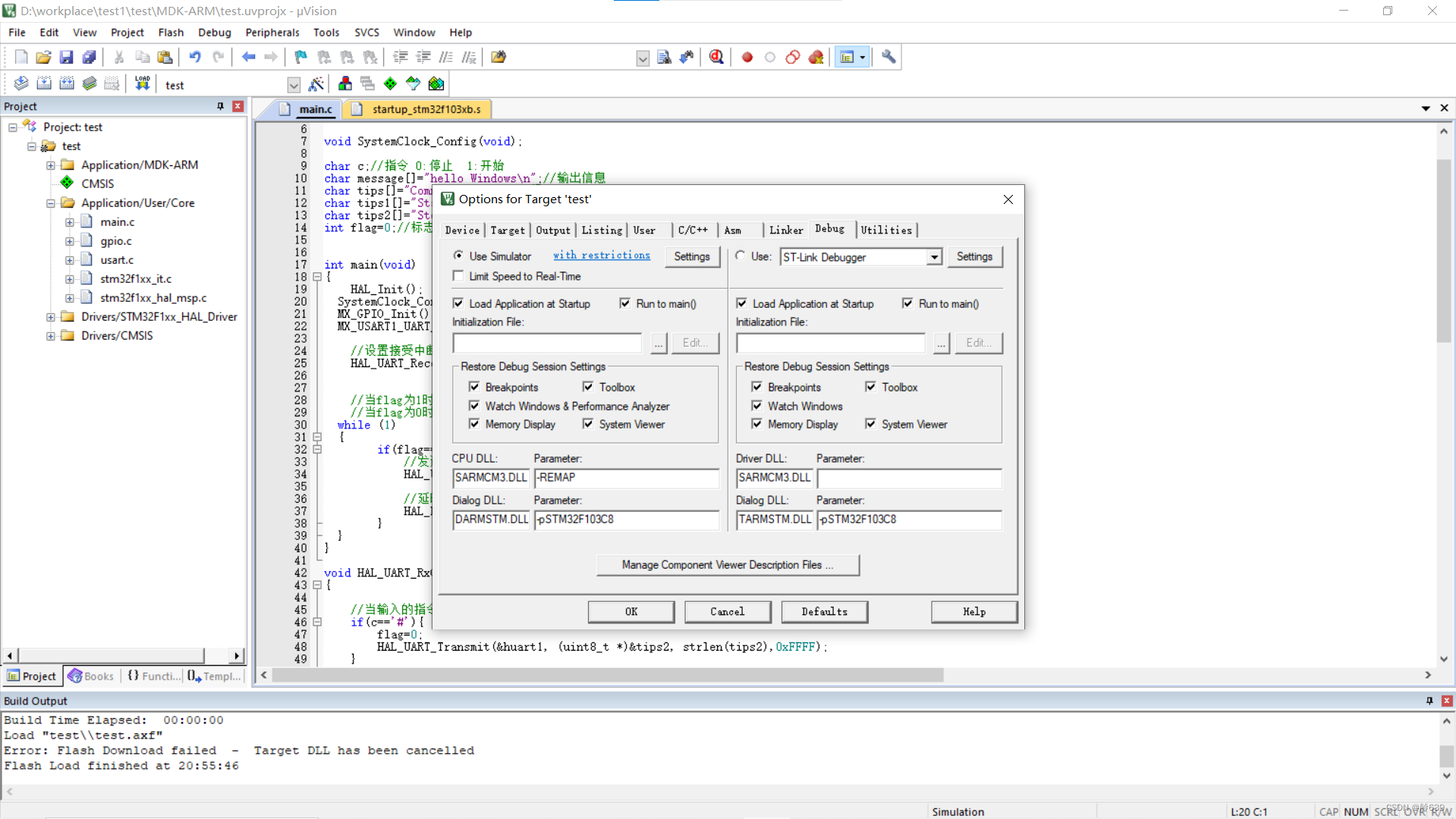
1.点开魔法棒工具
2.设置debug相关
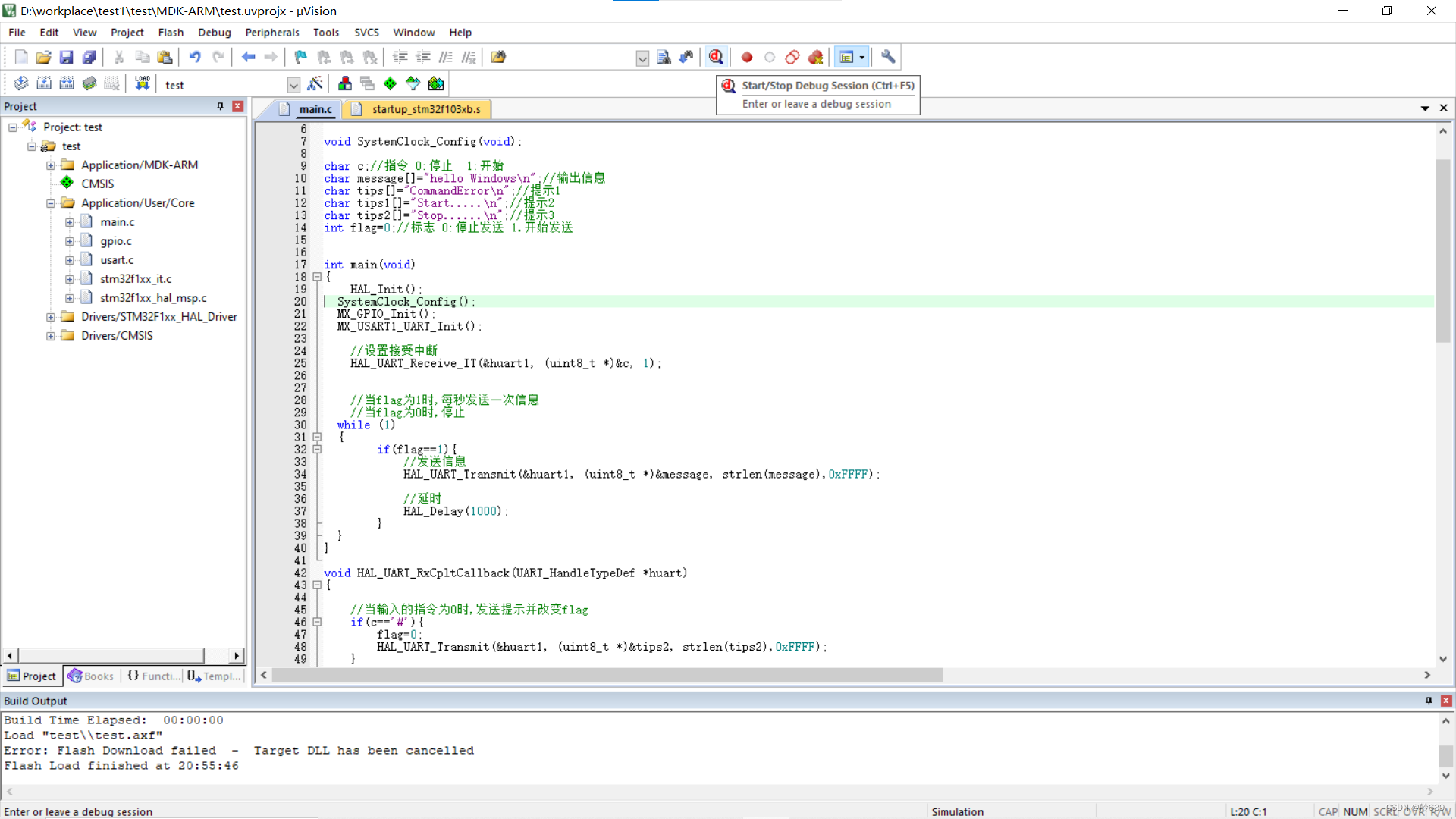
3.点击开始调试
4.打开symbol view窗口
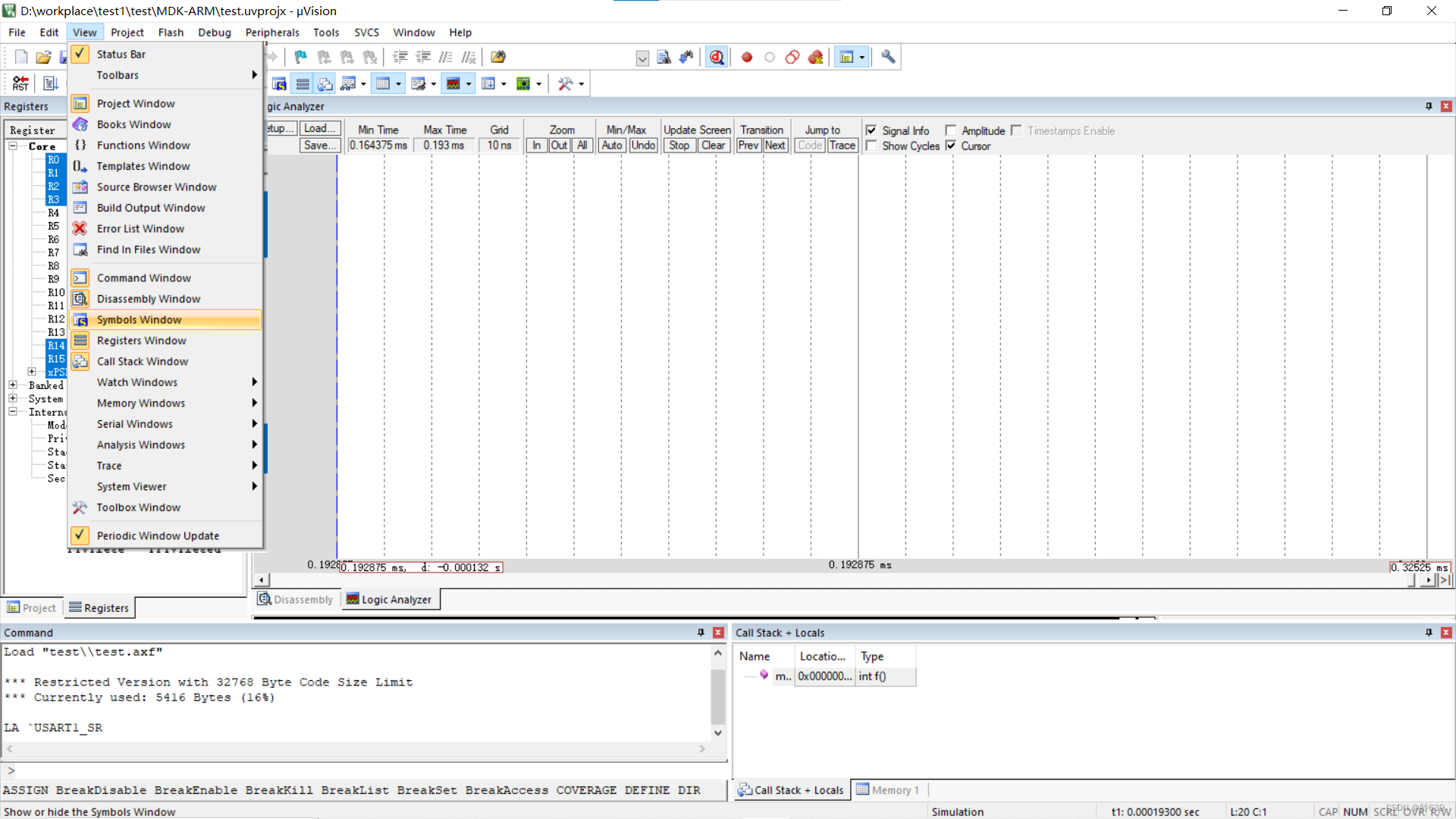
5.在special function register内找到USART1_SR
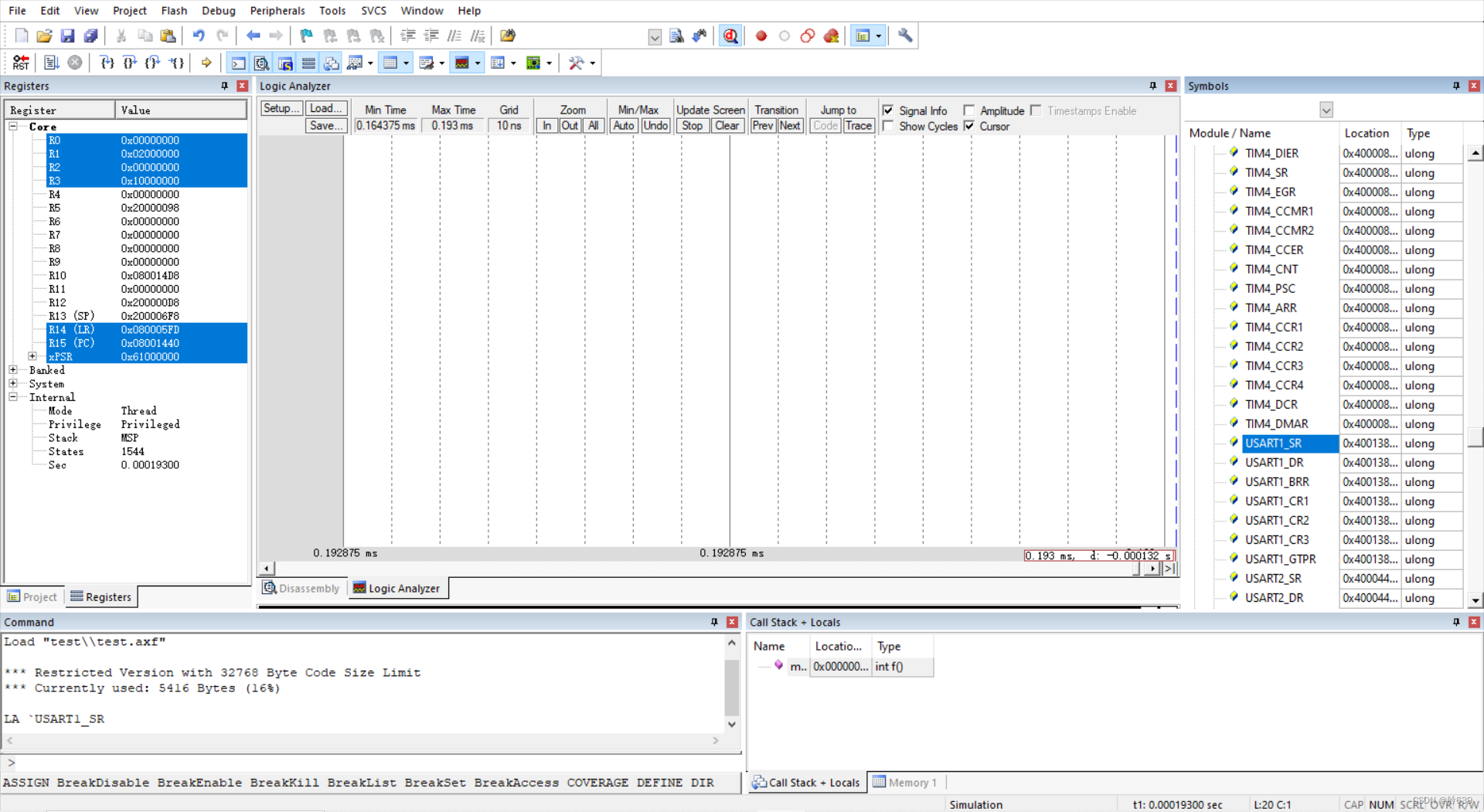
6.查看波形
智能推荐
[译]使用MVI打造响应式APP(四):独立性UI组件-程序员宅基地
文章浏览阅读130次。原文:REACTIVE APPS WITH MODEL-VIEW-INTENT - PART4 - INDEPENDENT UI COMPONENTS作者:Hannes Dorfmann译者:却把清梅嗅这篇博客中,我们将针对如何 如何构建独立组件 进行探讨,我将阐述为什么在我看来 父子关系会导致坏味道的代码,以及为何这种关系是没有意义的。有这样一个问题时不时涌现在我的脑海中—— MVI...
tensorflow经过卷积及池化层后特征图的大小计算_池化层后特征图尺寸-程序员宅基地
文章浏览阅读662次。https://blog.csdn.net/qq_32466233/article/details/81075288_池化层后特征图尺寸
使用vue-echarts异步数据加载,不能重新渲染页面问题。_vue echart初始化渲染过后无法重新渲染-程序员宅基地
文章浏览阅读3.3k次。一、问题说明我是用的是官方示例中的这个饼状图。结果在应用到项目中后发现利用axios请求到的数据无法渲染到页面中去。并且其中value值已经改变。二、解决办法用$set改变value的值,并且重新绘制一遍表格。$set是全局 Vue.set 的别名。$set用法:向响应式对象中添加一个属性,并确保这个新属性同样是响应式的,且触发视图更新。它必须用于向响应式对象上添加新属性,因为..._vue echart初始化渲染过后无法重新渲染
nrf51822 蓝牙协议栈 例程入门 点灯_nrf51822例程-程序员宅基地
文章浏览阅读6.6k次。1,参考文档: 青云蓝牙光盘V4.1\6.青云系列教程青风出品\3:BLE蓝牙应用篇\2.BLE实验第二节:蓝牙LED任务读写使用说明.pdf青云蓝牙光盘V4.1\6.青云系列教程青风出品\4:蓝牙原理详解手把手教你用蓝牙:蓝牙LED任务读写原理任务详解.pdf2,进入目录: 青云蓝牙光盘V4.1\5.青云测试代码\ 第三部分:BLE蓝牙实验\BLE实验3:按键蓝牙通知\B..._nrf51822例程
TortoiseGit小乌龟工具上传解析-程序员宅基地
文章浏览阅读5.2k次。使用tortoiseGit工具一直出错,由于没有设置自动获取putty key这一项,从网上找了一个教程,现分享如下,以做参考:前半部分参考网上的例子:http://www.showerlee.com/archives/1300,但会出现“git did not exit cleanly (exit code 128)”错误1.在D盘新建一个目录,例如"D:\Git",并进入目录右键目录空白处选择...
bindgetuserinfo="onGotUserInfo" and @getuserinfo="onGotUserInfo_component "pages/index/index" does not have a meth-程序员宅基地
文章浏览阅读1.9k次。发现使用uni-app获取UserInfo,结果使用微信官网栗子发现只弹出提示,没获取到值如下<button open-type="getUserInfo" lang="zh_CN" bindgetuserinfo="onGotUserInfo">获取用户信息</button>onGotUserInfo: function (e) { console.log(e) ..._component "pages/index/index" does not have a method "getuserinfo" to handle
随便推点
python translate函数_Python:内置函数makestrans()、translate()-程序员宅基地
文章浏览阅读287次。一、makestrans()格式: str.maketrans(intab,outtab);功能:用于创建字符映射的转换表,对于接受两个参数的最简单的调用方式,第一个参数是字符串,表示需要转换的字符,第二个参数也是字符串表示转换的目标。注:两个字符串的长度必须相同,为一一对应的关系。注:Python3.6中已经没有string.maketrans()了,取而代之的是内建函数:bytearray...._python maketrance
Set集合详解-程序员宅基地
文章浏览阅读5.7k次,点赞9次,收藏14次。set集合的简介,它的特点和遍历方式。介绍了HashSet重复元素存储底层原理,LinkedHashSet,TreeSet排序方法,SortedSet获取集合值的方法_set集合
详解智慧城市排水管理系统整体方案_污水处理智慧管理系统案列-程序员宅基地
文章浏览阅读3.6k次,点赞3次,收藏29次。随着城市规模的不断扩大和现代化程度的日益提高,城市排水管网越来越复杂,一些城市相继发生大雨内涝、管线泄漏爆炸、路面塌陷等事件,严重影响了人民群众生命财产安全和城市运行秩序。因此,摸清排水管网设施资产家底、建立排水管网地理信息系统,用现代化的技术手段对排水系统进行科学管理显得迫在眉睫。以时空信息为基础,充分利用感知监测网、物联网、云计算、移动互联网、工业控制和水力模型等新一代信息技术,全方位感..._污水处理智慧管理系统案列
详解NTFS文件系统_ntfs文件系统中,磁盘上的所有数据包括源文件都是以什么的形式存储-程序员宅基地
文章浏览阅读5.7k次,点赞4次,收藏13次。上篇在详解FAT32文件系统中介绍了FAT32文件系统存储数据的原理,这篇就来介绍下NTFS文件系统。NTFS、用过Windows系统的人都知道,它是一个很强大的文件系统,支持的功能很多,存储的原理也很复杂。目前绝大多数Windows用户都是使用NTFS文件系统,它主要以安全性和稳定性而闻名,下面是它的一些主要特点。安全性高:NTFS支持基于文件或目录的ACL,并且支持加密文件系统(E_ntfs文件系统中,磁盘上的所有数据包括源文件都是以什么的形式存储
【深度学习】【目标检测】损失函数smooth L1 Loss_smooth_l1_loss公式-程序员宅基地
文章浏览阅读1.2k次。pytorch之常用Loss函数总结参考文档L1、L2、smooth L1 Losssoftmax_cross_entropy_with_logitssparse_softmax_cross_entropy_with_logitsbinary_cross_entropysigmoid_cross_entropy参考文档参考文档参考文档L1、L2、smooth L1 Losssoftmax..._smooth_l1_loss公式
PAT 乙级 1017 (方法 + 代码)_pat 1017乙-程序员宅基地
文章浏览阅读462次。1017 A除以B (20 分)本题要求计算 A/B,其中 A 是不超过 1000 位的正整数,B 是 1 位正整数。你需要输出商数 Q 和余数 R,使得 A=B×Q+R 成立。输入格式:输入在一行中依次给出 A 和 B,中间以 1 空格分隔。输出格式:在一行中依次输出 Q 和 R,中间以 1 空格分隔。输入样例:123456789050987654321 7输出样例:17636..._pat 1017乙