【激光雷达】技术整理篇_激光雷达csdn-程序员宅基地
技术标签: 其他
激光雷达技术
1 引言
在了解激光雷达之前先认识下雷达:
雷达 ,是英文“Radar”的音译,英文全称为 Radio Detection and Ranging ,即无线电探测和测距。
雷达向目标发射无线电波,通过发送信号与目标反射信号进行对比,来获得目标至发射点距离、距离变化率、方位、高度以及角度等信息。
各种雷达的用途和结构不尽相同,但基本构造都包括:发射器、接收器机和处理器。
事实上,不论无线电波,还是我们平时看到的可见光,在本质上都是电磁波,在真空中传播的速度都是光速。下图为电磁波图谱:
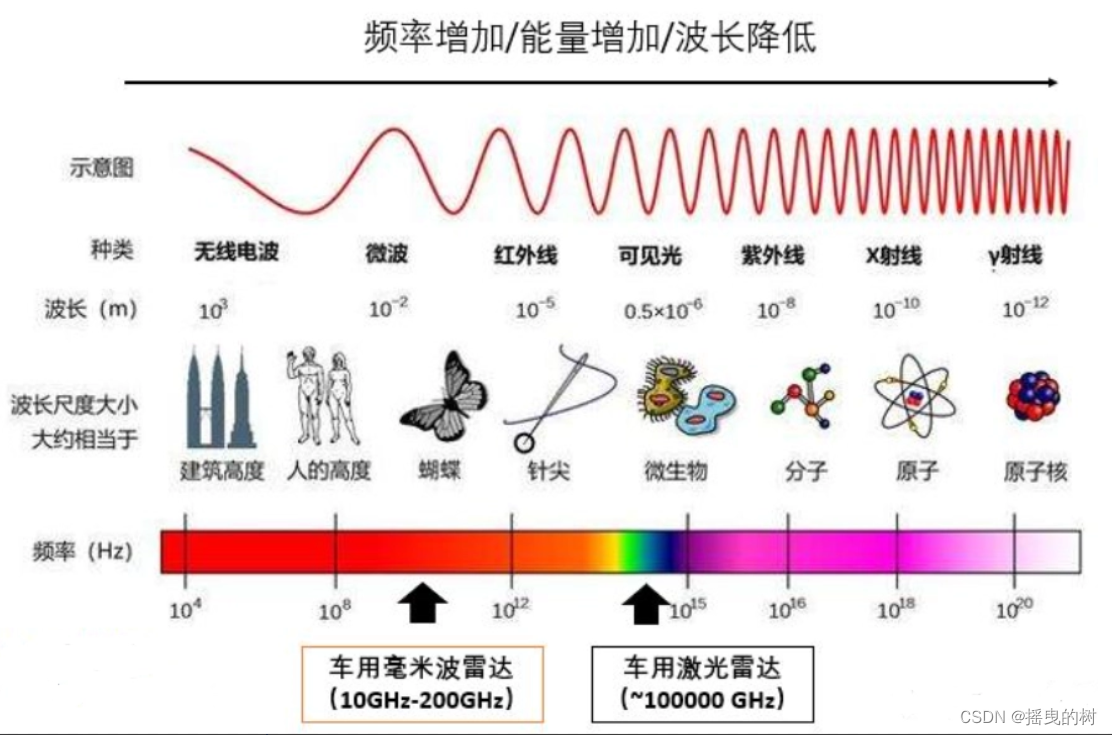
公式: 光速 = 波长 ∗ 频率 光速= 波长 * 频率 光速=波长∗频率
频率越高,波长越短。波长越短,意味着分辨率越高;而分辨率越高,意味着在距离、速度、角度上的测量精度更高。

2 激光雷达
激光雷达(英文Lidar),英文全称为Laser Detecting and Ranging,即激光探测和测距。
2.1 工作原理
2.1.1 基本原理
与雷达工作原理类似:
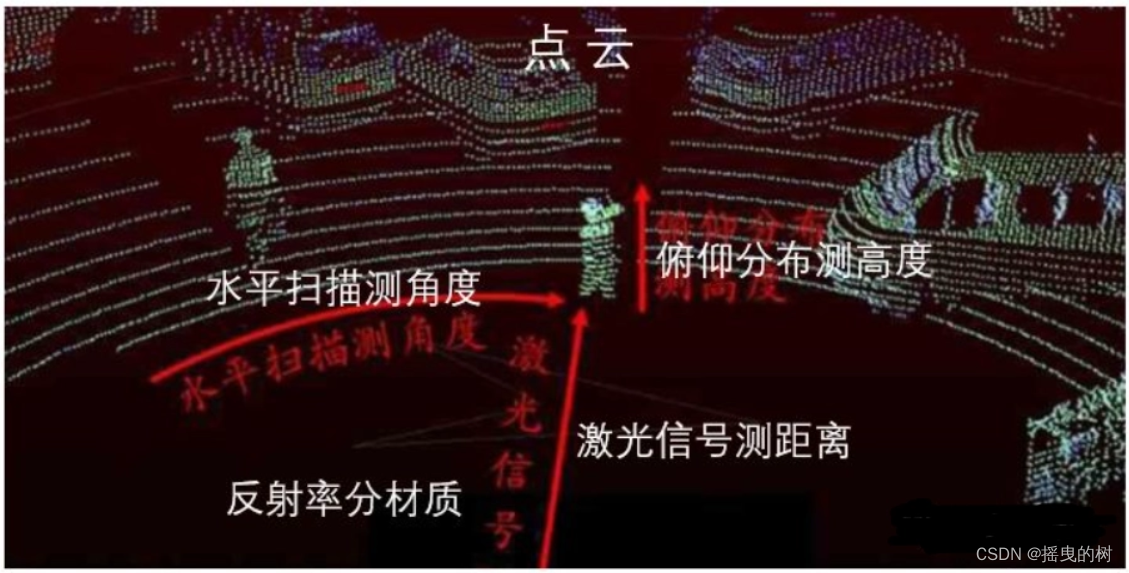
- 激光雷达通过发射和接收激光束,测量激光信号的时间差或相位差来确定距离;
- 通过水平旋转扫描来测角度,并根据这两个参数建立二维的极坐标系;
- 再通过获取不同俯仰角度信号获得三维中的高度信息。
高频激光可在一秒内获取大量(约150万个)的位置点信息(称为点云),并根据这些信息进行三维建模。
2.1.2 激光雷达的特点
- 与传统的二维投影成像模式相比,可采集目标表面深度信息,并得到目标相对完整的空间信息,经数据处理重构目标三维表面,获得更能反映目标几何外形的三维图形,同时还能获取目标表面反射特性、运动速度等丰富的特征信息,为目标探测、识别、跟踪等数据处理提供充分的信息支持、降低算法难度;
- 一种主动激光技术,具有测量分辨率高,抗干扰能力强、抗隐身能力强、穿透能力强和全天候工作的特点。
2.1.3 激光雷达系统组成
激光雷达 = 激光发射 + 激光接收 + 信息处理 + 扫描系统 激光雷达 = 激光发射+激光接收+信息处理+扫描系统 激光雷达=激光发射+激光接收+信息处理+扫描系统
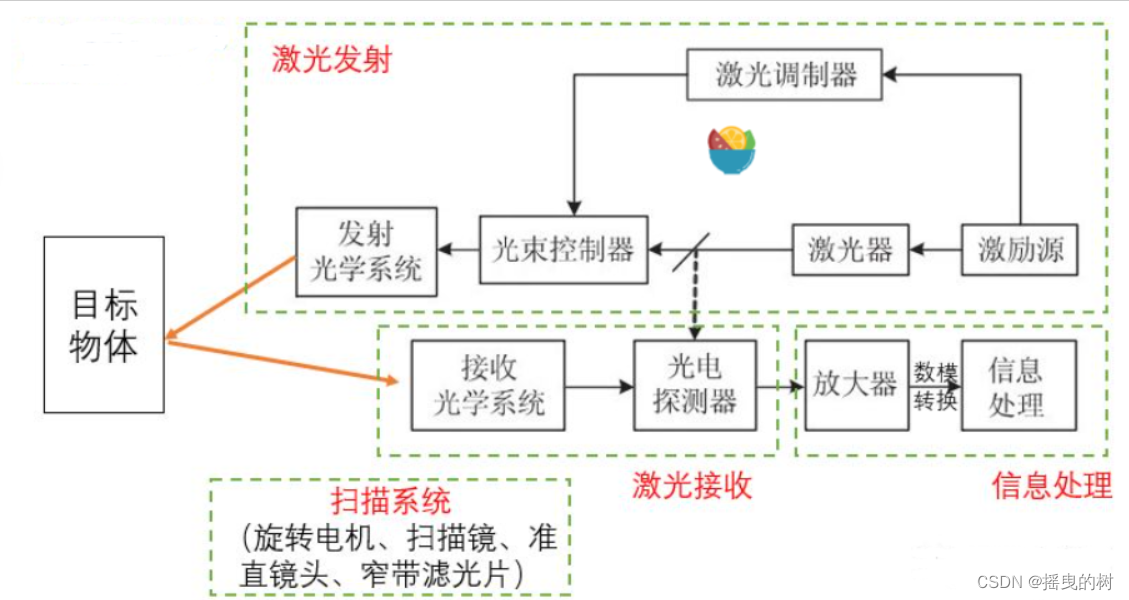
- 激光发射系统:激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体; 脉冲:隔一段相同的时间发出的波(电波/光波等等)等机械形式
- 激光接收系统:经接收光学系统,光电探测器接受目标物体反射回来的激光,产生接收信号;
- 信息处理系统:接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型。
- 扫描系统:以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息

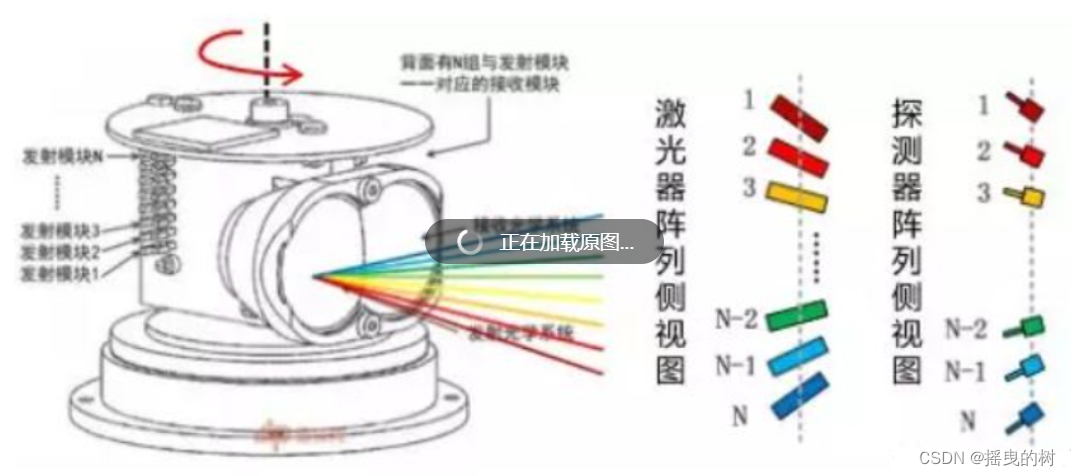
激光雷达核心器件组成:

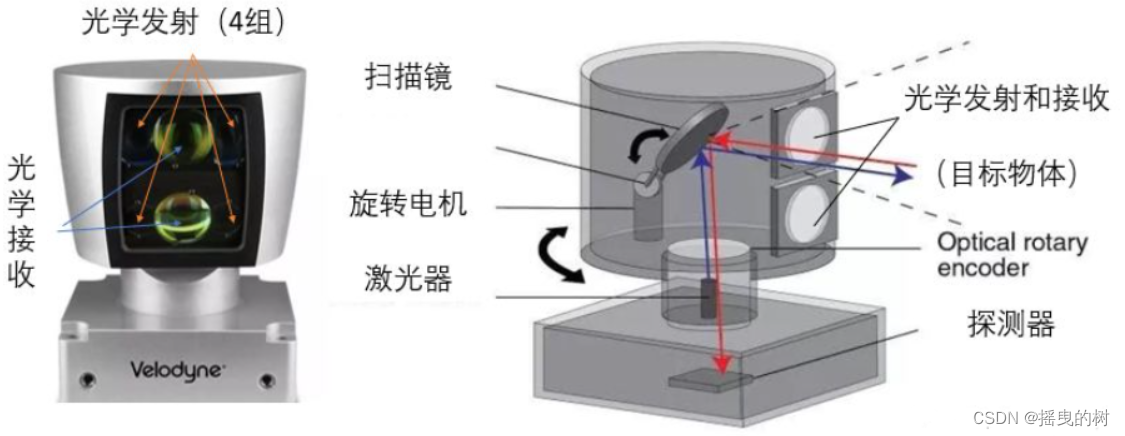
该雷达前端上下分布有四组激光发射器(每组16个发射机,共64个)和两组激光接受器(每组32个激光接收机,对应64个)
2.2 激光雷达的分类
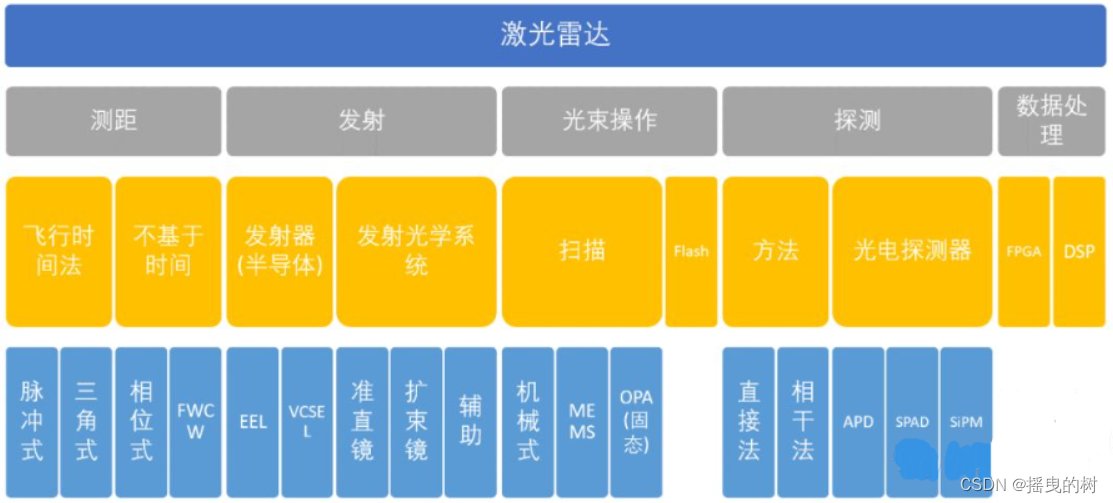
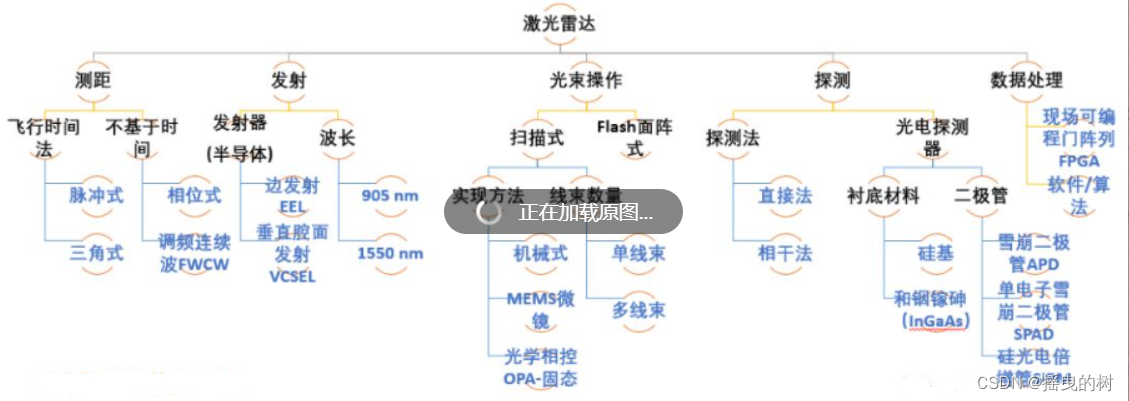
常见的激光雷达的表述有:机械、固态、MEMS、OPA、Flash、FMCW、飞行时间法,但是这些分类的依据是什么呢?
根据激光雷达的五大关键技术进行系统地分类:
1. 测距:与时间是否有关
2. 发射:激光器,波长,透镜系统
3. 扫描(光束操纵):机械和固态
4. 探测:直接和相干,光电探测器是核心
5. 数据处理技术
2.2.1 测距:与时间是否有关
测量距离有两种方法:
- 一种是基于时间的测量方法:飞行时间法(time of flight,TOF),包括 脉冲式 和三角式,需要直接测量激光往返时间,难度较高,精确度也低;
- 一种是不基于时间的测距法:相位式 和 调频连续波(FMCW)
脉冲式,也称为直接式,如下公式:
D = c × t / 2 D = c ×t / 2 D=c×t/2
D为测量距离,c为恒定的光速,t激光往返时间,脉冲式的工作原理十分简单,恒定速度乘以时间等于距离,由于是往返,所以除以2。
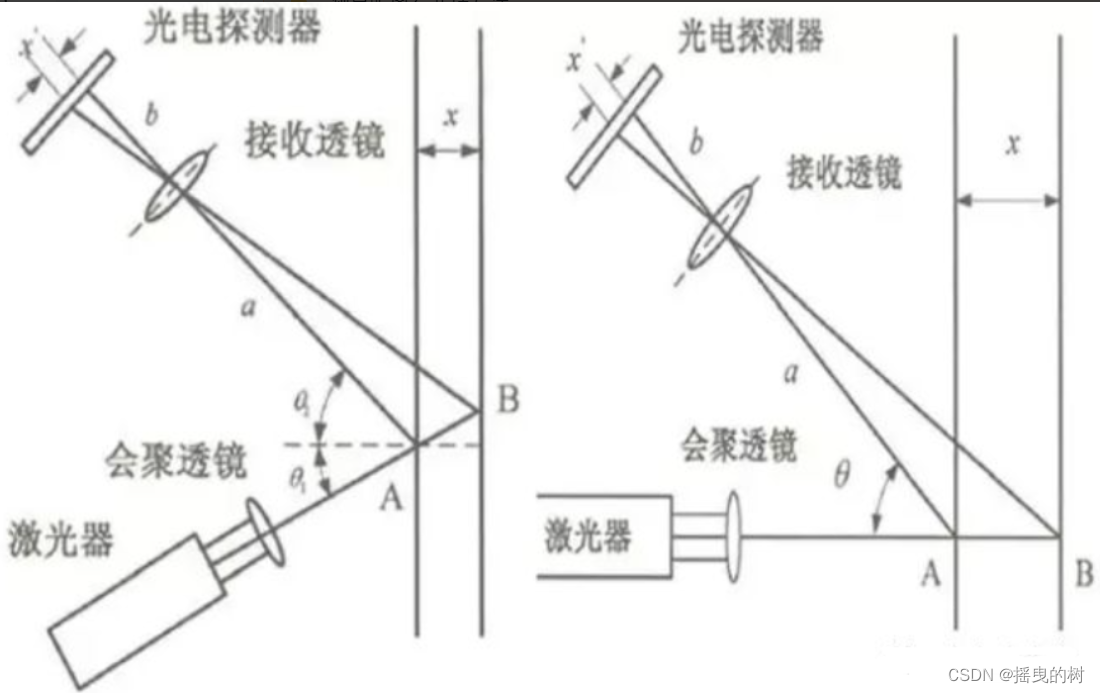
三角式,也称为间接式,将光源、被测物、接收系统三点组成一个三角形光路,接收系统接收来自于被测物面的散射光,并将其成像在光电探测器敏感面上,通过光点在敏感面上的位移,从而计算出被测物的移动距离。
相位式,不以时间为基准,而是将一种调制信号对激光光强进行调制,通过测量相位差来间接测量往返时间。公式如下:
D = A / 2 × B / ( 2 π ) D = A / 2 ×B / (2 π) D=A/2×B/(2π)
D为距离,B为激光往返一次所产生的相位差,A为调制信号的波长,A/2称为测尺,即相位变化为2π时所对应的距离。相位式适应于中短距离的测量,是目前测距精度最高的一种方式。
调频连续波(FMCW),通过比较反射信号与发射信号频率的方法来得到目标的距离信息
2.2.2 发射:激光器,波长,透镜系统
激光发射部分:包含了激光器和发射光学系统
激光发射器有四种类型:半导体激光器、固体激光器、光纤激光器和二氧化碳气体激光器
激光雷达主要采用半导体激光器(又称激光二极管)
- 激光由边缘发出的边发射激光器(EEL)
- 激光垂直于顶面的垂直腔面发射激光器(Vertical-CavitySurface-Emitting Laser,简称VCSEL),其出射光束圆形对称,光能转换效率高,光源具有高度一致性和高指向性等优点,被业界看好。
激光器的选择
激光最关键指标在于波长、人眼安全、与大气相互作用,由此选用激光器、光电探测器。
目前业内主流采用905nm和1550 nm两种波长:
- 905nm波长适用的光电探测器比1550nm的更便宜,但1550nm对人眼安全性更高。
- 针对于与大气相互作用,1550nm吸水率比905nm更强,但905nm的光损失更少。
发射光学系统,对激光器的输出光束进行准直整形,改善输出光束质量
发射光学系统主要由透镜、反射器件、衍射器件等光学元器件组成,主要包含了准直镜、分束器、扩散片等。
由于各种激光器发射的激光束并不是绝对平行的,因此还需要一套透镜系统,即发射光学系统,改变发射光束的发散度、波束宽度和截面积,使总功率保持不变。
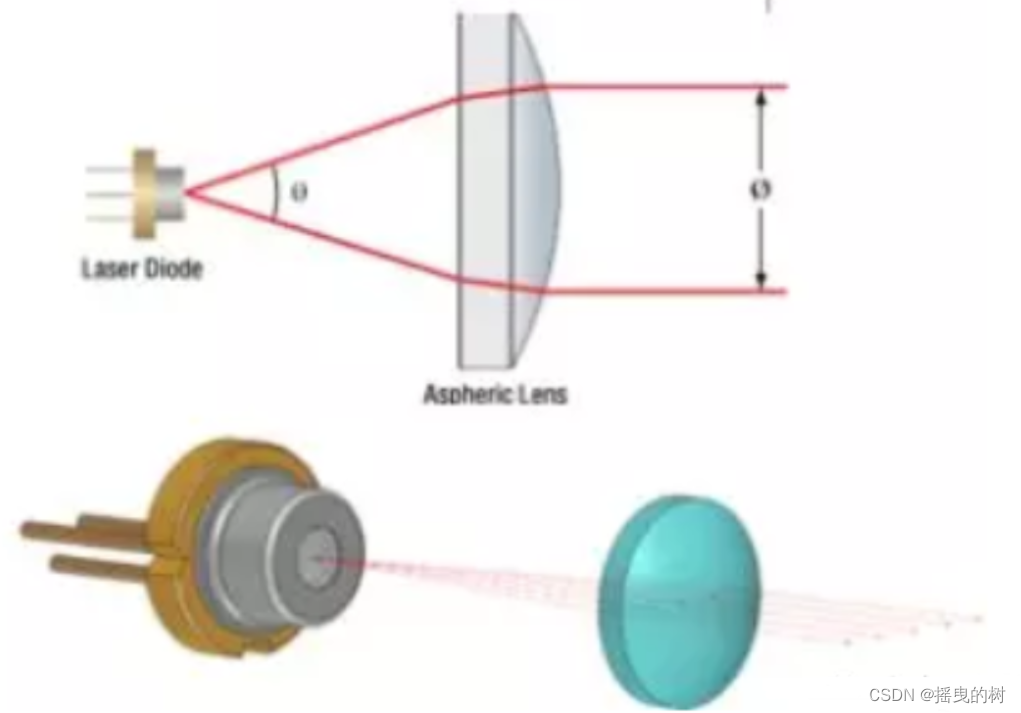
发射光学系统,一般由准直镜、扩束镜和辅助光学系统组成。
- 准直镜是为了解决激光器准直输出问题
- 扩束镜为了解决激光发散角问题
- 而辅助光学系统为了解决激光束偏振太难控制、光隔离等问题。
2.2.3 扫描(光束操纵):机械和固态
激光雷达的扫描技术:
- 扫描式激光雷达:通过多个激光光束扫描环境(机械式、MEMS、OPA(固态))
- Flash面阵式激光雷达:通过对场景进行光覆盖而实现
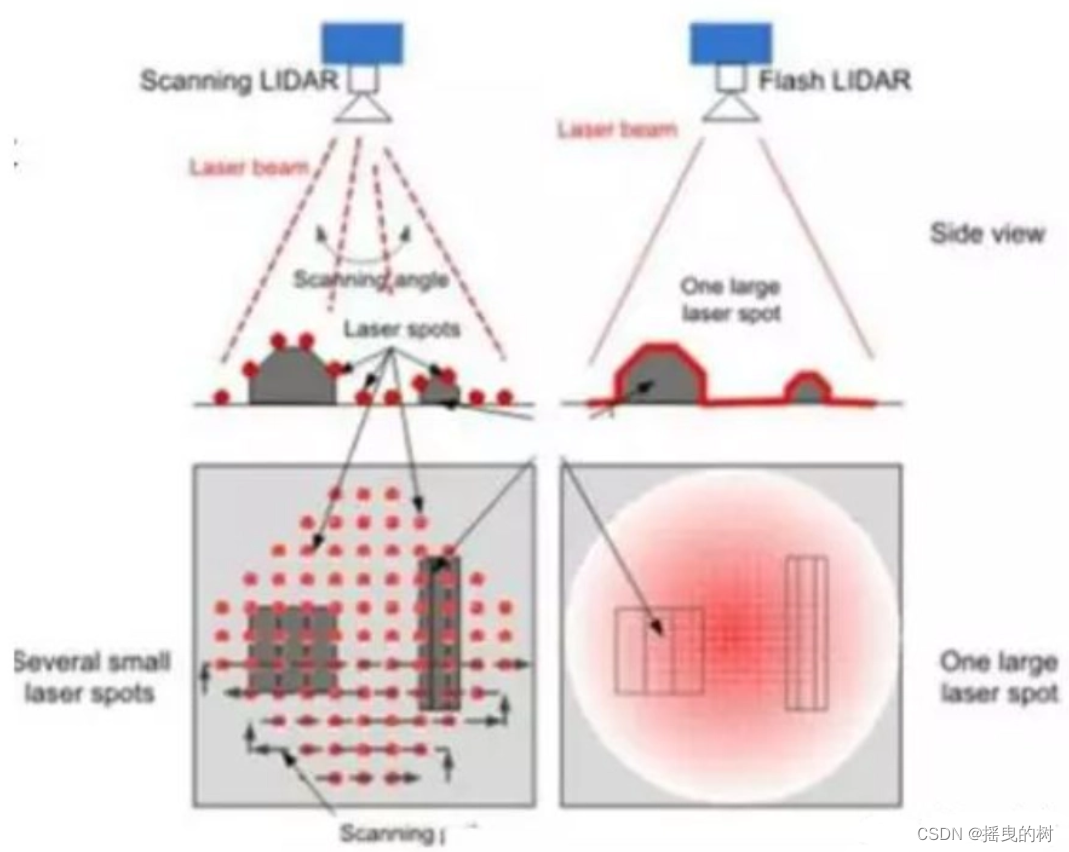
扫描式激光雷达,以下三种:
(1)机械式扫描:安装在车顶以一定的速度旋转,在水平方向采用机械360°旋转扫描,在垂直方向采用了定向分布式扫描,这种方法使用旋转多面镜控制光束;
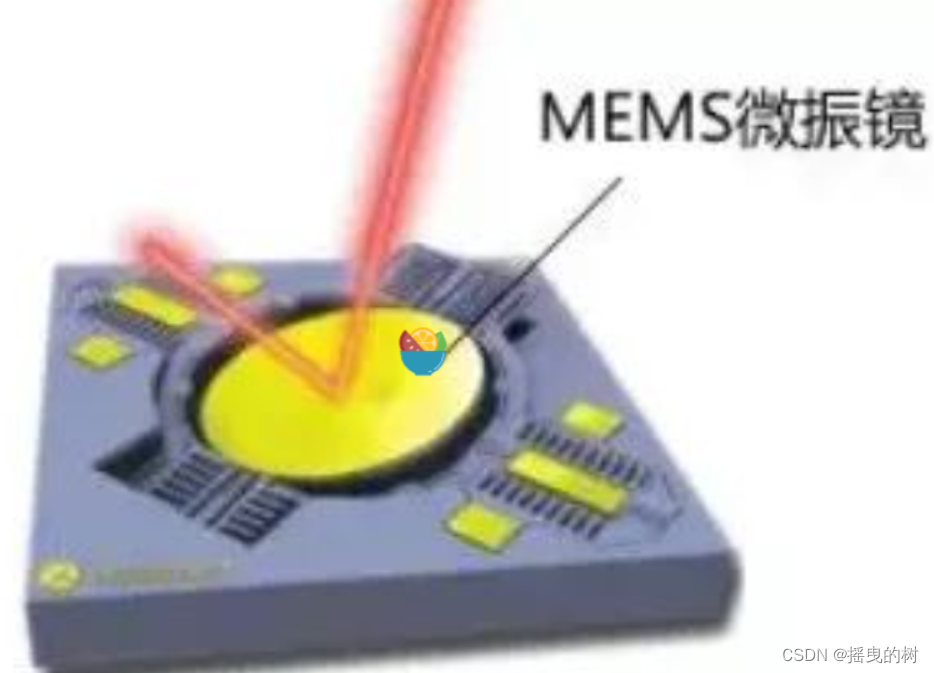
(2) MEMS(微机电系统)微镜:镜本质上是一种硅基半导体元器件,其特点是内部集成了“可动”的微型镜面,采用静电或电磁驱动方式。把所有的机械部件集成到单个芯片上,利用半导体工艺生产,不需要机械式旋转电机,而是以电的方式来控制光束。微镜振动幅度很小,频率高,成本低,技术成熟。但MEMS微镜的几何尺寸限制了其振荡幅度,其视野有限,无法实现360度;
(3) 固态扫描 (光学相控阵(OPA)技术):原理与相控阵雷达类似,它由元件阵列组成,通过控制每个元件发射光的相位和振幅来控制光束,无需任何机械部件,因此也称为。扫描速度快,精度高,可控制性好是它的优点,但OPA芯片纳米加工难度高非常高。
Flash面阵式激光雷达:不是逐点扫描,单次发射只探测某个方位,而是利用激光器同时照亮整个场景,对场景进行光覆盖,一次性实现全局成像,故也称为闪烁式激光雷达。这种方式无扫描器件,成像速度快,缺点是激光功率受限,探测距离近,抗干扰能力差。
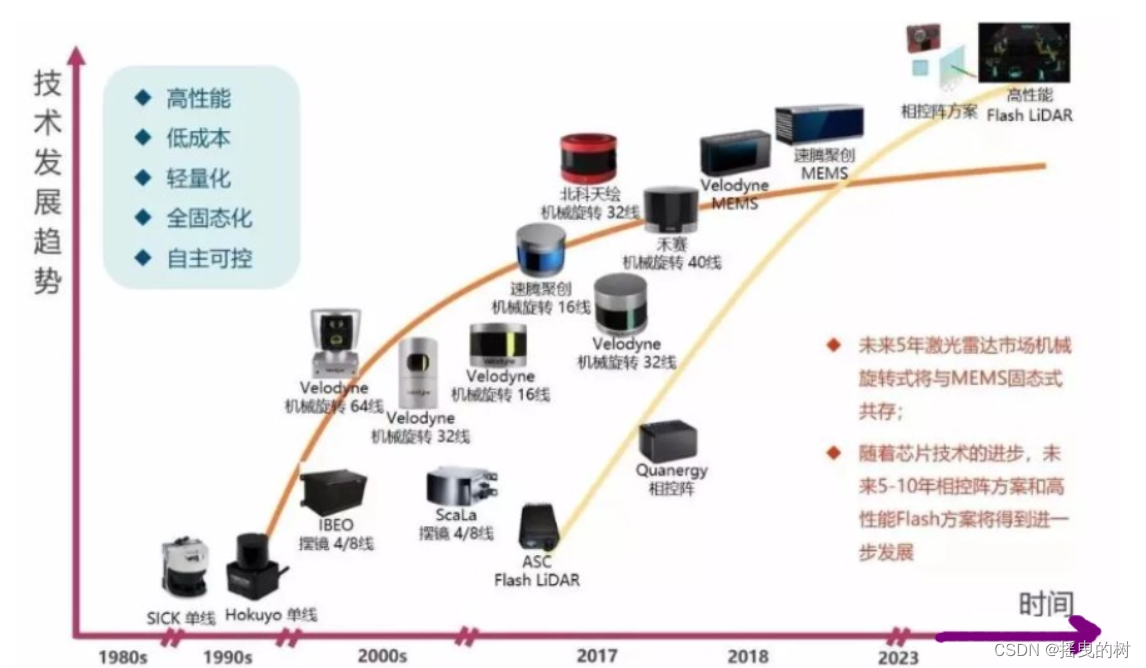
目前,MEMS和Flash技术更受到激光雷达厂商的青睐,有望逐步取代主流的机械式激光雷达
2.2.4 探测:直接和相干,光电探测器是核心
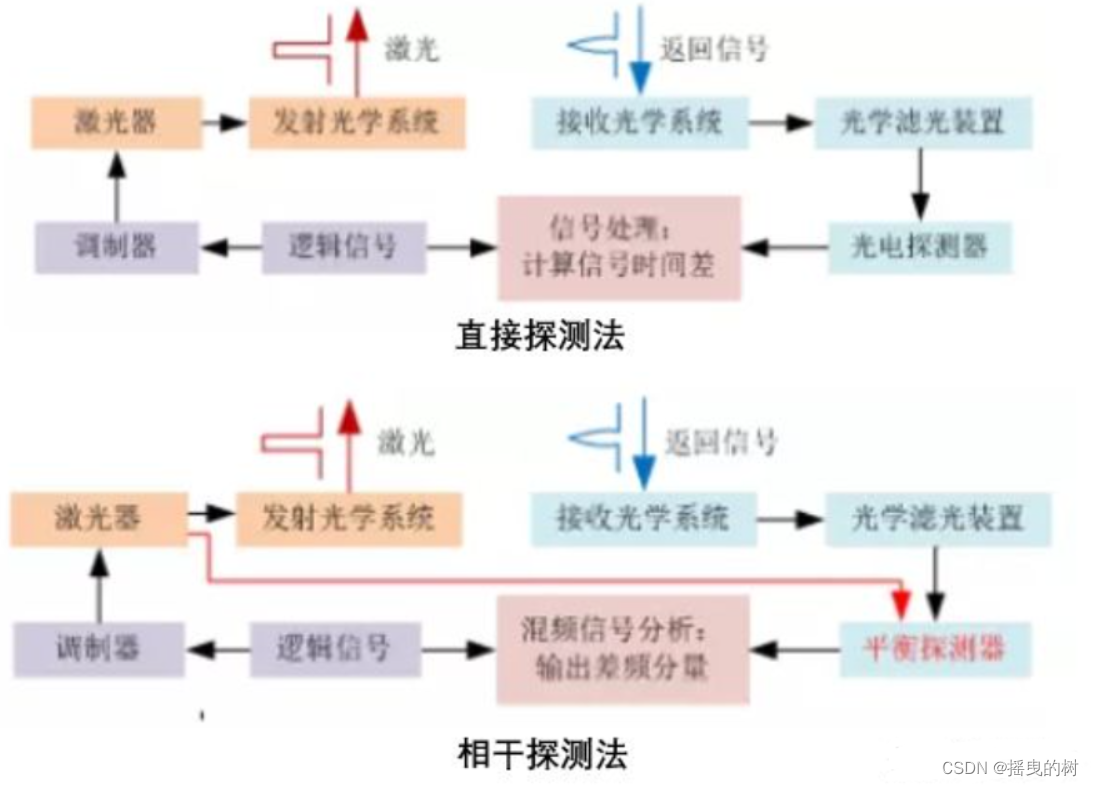
探测技术:探测器将光信号转换为电信号,电信号经过放大(放大器),降低噪声和干扰,然后经过数模转换(数模转换器),进行处理和计算。
- 直接探测法,也称为能量探测法,利用探测器的光电转换功能直接实现对光信号的信息解调
- 相干探测法,也称为外差探测法,即多了一路激光输出,需要对信号进行混频分析,其优点是灵敏度和精度高,缺点是系统比较复杂
激光探测的核心器件是光电探测器,能把光能转换成一种便于测量(电压或电流)物理量的半导体器件,主要有频带宽、灵敏度高、线性输出范围宽、噪声低等要求。目前主要有PIN光电二极管、雪崩二极管(APD)、单光子雪崩二极管(SPAD)和硅光电倍增管(SiPM)等。

2.2.5 数据处理技术
信息处理系统:主要任务是对信号进行处理,计算,完成三维图像重构。目前主要采用大规模集成电路和计算机完成,可利用FPGA技术(Field Programmable Gate Array)实现、高速DSP等完成。
3 激光雷达行业分析
3.1 市面上的分类
激光雷达按照“测距、发射、光速操纵、探测、数据处理”五大关键技术可以分为以下类别:
市面上一般都是以光束操纵方式分为扫描式激光雷达和Flash面阵式激光雷达
扫描式激光雷达主要通过激光光束来扫描环境,根据发射的光束数量又可以分为单线束扫描和多线束扫描。线束越多,越密,对环境描述更加充分。
单线束激光雷达只能进行平面式扫描,不能测量物体高度,目前主要应用于机器人领域,如扫地、送餐、酒店服务等;
而无人驾驶主要采用多线束激光雷达,市场上有4线、8线、16 线、32 线、 64 线和128线之分
3.2 激光雷达的产业链:上游元器件,中游集成,下游应用

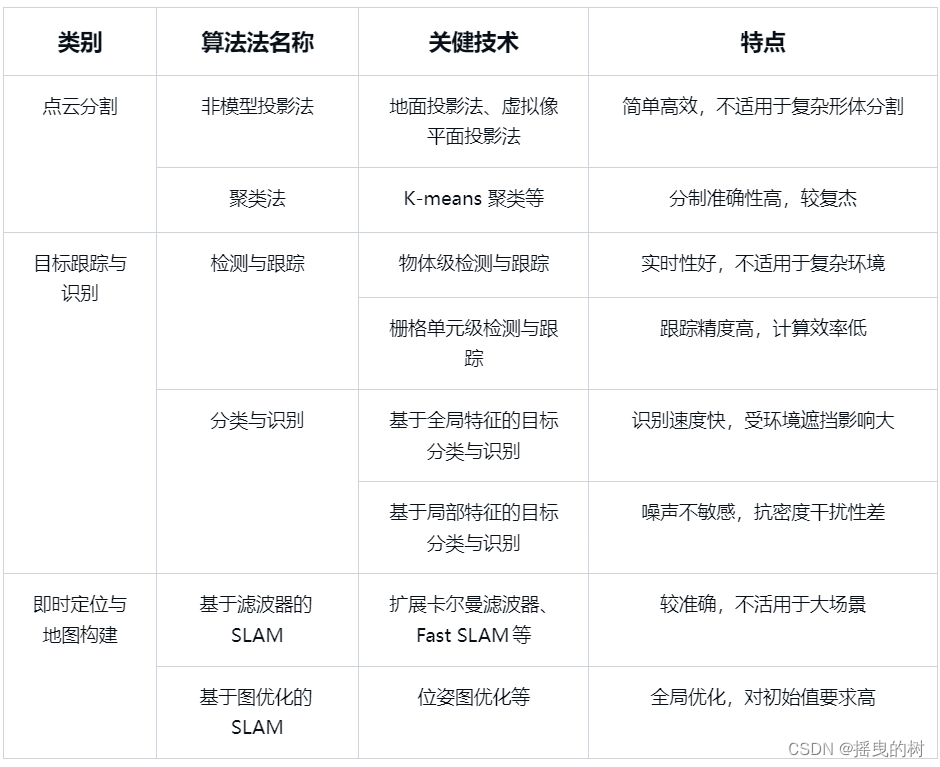
3.3 激光雷达的算法
高效的算法对激光雷达十分重要,目前应用于无人驾驶的激光雷达算法可分为三类:点云分割算法、目标跟踪与识别算法、即时定位与地图构建算(simultaneouslocalization and mapping,SLAM)
不同的算法解决不同场景下的问题,点云分割是目标跟踪与识别的基础;目标跟踪与识别将实现对汽车周围障碍物运动状态和几何特征的判断;而SLAM实现汽车的精确定位与可通行路径规划。
下图为各种算法的总结:
3.4 激光雷达厂家
1. 国外:Velodyne、Quanergy、Ibeo
2. 国内:速腾聚创、禾赛科技、北科天绘、镭神智能
| 公司 | 成立时间 | 激光雷达产品类型 | 代表产品 | 公司特点 |
|---|---|---|---|---|
| Velodyne(美)行业龙头 | 1983 | 机械式:16/32/64线;Vella 软件+ 低成本固态激光雷达组合 | 64线激光雷达HDL-64E探测距离为120米,测距精度2厘米,横向和纵向测量精度分别为0.08度和0.4度,每秒扫描点为130万个Velarray (固态MEMS) | 机械式激光雷达起步较早,技术领先,同时与谷歌、通用汽车、福特、Uber、百度等全球自动驾驶领军企业建立了合作关系,占据了车载激光雷达80%左右的市场份额 |
| Quanergy(美) | 2012 | 固态式(光学相控阵(OPA)技术) | S3(固态OPA)探测距离为150 米,价格只有250美元,且体积相比于机械式大大降低。但S3不能实现360°旋转,只能探测前方180°的视角范围,因此一辆汽车至少需要4至6个S3激光雷达,其S3测量精度、水平视野等参数特性上还有待进一步提升。 | 2014年推出其第一款产品 M8-1,并在奔驰、现代等公司的实验车型上得到应用,M8 之后Quanergy 相继发布的产品都开始走固态路线,采用了 OPA 光学相控阵技术,规模量产后将大幅降低传感器价格。 |
| Ibeo(德) | 1998 | 4线机械;固态式激光雷达 | ibeoNEXT(纯固态) | 全球第一个拥有车规级激光雷达的企业, 2017 年推出了全固态激光雷达 A-Sample 样机。 |
| RoboSense速腾聚创 | 2014 | 机械式:16/32线;固态MEMS | RS-LiDAR-M1(固态MEMS) | |
| 禾赛科技 | 2012 | 机械式:40/64线;固态MEMS | 1.PandarGT (固态MEMS) 2.AT128 | 禾赛科技是一家全球化的激光雷达研发与制造企业。公司产品广泛应用于支持高级辅助驾驶系统(ADAS)的乘用车和商用车,以及自动驾驶汽车,截至 2022 年底累计交付量超过 10 万台。 |
| 镭神智能 | 2015 | 机械式:16/32 线:固态MEMS车规级混合固态 | LS25、LS26混合固态激光雷达 | 国内唯一一家自主研发出激光雷达专用16通道 TIA 芯片、激光雷达自动化及半自动化生产线、1550nm光纤激光器的激光雷达公司,目前公司主打的是车规级 128 线混合固态激光雷达服务覆盖自动驾驶、智慧交通、轨道交通、通用航空、机器人、智慧物流、高端安防、港口、测绘及工业自动化等十大产业生态圈。 |
| 北科天绘 | 2005 | 机械式:16/32 线固态、3D-flash | C-Fans-256图像级超高分辨率固态激光雷达 | 全球唯一一家同时具备测量型、导航型两大类激光雷达研制能力的公司 |
| 大疆览沃科技有限公司 | 2016 | 车规级、工规级 | 1.Tele-15(适用于 L3/L4 级别自动驾驶方案)2.AVIA 傲览 | 览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。通过降低使用门槛和生产成本,Livox将激光雷达技术集成到更多产品和应用之中,从而为自动驾驶、智慧城市、测绘、移动机器人等行业带来创新性改变。团队花费两年时间研发的车规级激光雷达——Livox 浩界 HAP,已在小鹏汽车上应用。 |
| 图达通 | 2016 | 图像级激光雷达 | 猎鹰精英版 | Innovusion是全球图像级激光雷达提供商,在硅谷、苏州和上海设有研发中心,在宁波和苏州拥有高度工业化的⻋规级激光雷达制造基地。 |
技术指标(评价激光雷达的性能)
1. 最大辐射功率:决定是否需要防护
2. 水平视场:是否360度全视角旋转
3. 垂直视场:俯仰角角度(30度/15度)
4. 光源波长:光学参数(纳米级别)
5. 测量距离:是否满足长距离探测(200米)
6. 测量时间和帧频率:激光返回一圈的时间
7. 纵向和水平分辨率:对算法影响大,精度越高越贵
8. 测距精度:厘米级
3.5 发展前景
参考链接:
激光雷达全面分析(一):最大优势,四大系统,八个指标
激光雷达全面分析(二):五大关键技术,发射扫描,光束控制,分类
激光雷达全面分析(三),看光与电的共舞,世界两大龙头,国内百花齐放
智能推荐
Docker 快速上手学习入门教程_docker菜鸟教程-程序员宅基地
文章浏览阅读2.5w次,点赞6次,收藏50次。官方解释是,docker 容器是机器上的沙盒进程,它与主机上的所有其他进程隔离。所以容器只是操作系统中被隔离开来的一个进程,所谓的容器化,其实也只是对操作系统进行欺骗的一种语法糖。_docker菜鸟教程
电脑技巧:Windows系统原版纯净软件必备的两个网站_msdn我告诉你-程序员宅基地
文章浏览阅读5.7k次,点赞3次,收藏14次。该如何避免的,今天小编给大家推荐两个下载Windows系统官方软件的资源网站,可以杜绝软件捆绑等行为。该站提供了丰富的Windows官方技术资源,比较重要的有MSDN技术资源文档库、官方工具和资源、应用程序、开发人员工具(Visual Studio 、SQLServer等等)、系统镜像、设计人员工具等。总的来说,这两个都是非常优秀的Windows系统镜像资源站,提供了丰富的Windows系统镜像资源,并且保证了资源的纯净和安全性,有需要的朋友可以去了解一下。这个非常实用的资源网站的创建者是国内的一个网友。_msdn我告诉你
vue2封装对话框el-dialog组件_<el-dialog 封装成组件 vue2-程序员宅基地
文章浏览阅读1.2k次。vue2封装对话框el-dialog组件_
MFC 文本框换行_c++ mfc同一框内输入二行怎么换行-程序员宅基地
文章浏览阅读4.7k次,点赞5次,收藏6次。MFC 文本框换行 标签: it mfc 文本框1.将Multiline属性设置为True2.换行是使用"\r\n" (宽字符串为L"\r\n")3.如果需要编辑并且按Enter键换行,还要将 Want Return 设置为 True4.如果需要垂直滚动条的话将Vertical Scroll属性设置为True,需要水平滚动条的话将Horizontal Scroll属性设_c++ mfc同一框内输入二行怎么换行
redis-desktop-manager无法连接redis-server的解决方法_redis-server doesn't support auth command or ismis-程序员宅基地
文章浏览阅读832次。检查Linux是否是否开启所需端口,默认为6379,若未打开,将其开启:以root用户执行iptables -I INPUT -p tcp --dport 6379 -j ACCEPT如果还是未能解决,修改redis.conf,修改主机地址:bind 192.168.85.**;然后使用该配置文件,重新启动Redis服务./redis-server redis.conf..._redis-server doesn't support auth command or ismisconfigured. try
实验四 数据选择器及其应用-程序员宅基地
文章浏览阅读4.9k次。济大数电实验报告_数据选择器及其应用
随便推点
灰色预测模型matlab_MATLAB实战|基于灰色预测河南省社会消费品零售总额预测-程序员宅基地
文章浏览阅读236次。1研究内容消费在生产中占据十分重要的地位,是生产的最终目的和动力,是保持省内经济稳定快速发展的核心要素。预测河南省社会消费品零售总额,是进行宏观经济调控和消费体制改变创新的基础,是河南省内人民对美好的全面和谐社会的追求的要求,保持河南省经济稳定和可持续发展具有重要意义。本文建立灰色预测模型,利用MATLAB软件,预测出2019年~2023年河南省社会消费品零售总额预测值分别为21881...._灰色预测模型用什么软件
log4qt-程序员宅基地
文章浏览阅读1.2k次。12.4-在Qt中使用Log4Qt输出Log文件,看这一篇就足够了一、为啥要使用第三方Log库,而不用平台自带的Log库二、Log4j系列库的功能介绍与基本概念三、Log4Qt库的基本介绍四、将Log4qt组装成为一个单独模块五、使用配置文件的方式配置Log4Qt六、使用代码的方式配置Log4Qt七、在Qt工程中引入Log4Qt库模块的方法八、获取示例中的源代码一、为啥要使用第三方Log库,而不用平台自带的Log库首先要说明的是,在平时开发和调试中开发平台自带的“打印输出”已经足够了。但_log4qt
100种思维模型之全局观思维模型-67_计算机中对于全局观的-程序员宅基地
文章浏览阅读786次。全局观思维模型,一个教我们由点到线,由线到面,再由面到体,不断的放大格局去思考问题的思维模型。_计算机中对于全局观的
线程间控制之CountDownLatch和CyclicBarrier使用介绍_countdownluach于cyclicbarrier的用法-程序员宅基地
文章浏览阅读330次。一、CountDownLatch介绍CountDownLatch采用减法计算;是一个同步辅助工具类和CyclicBarrier类功能类似,允许一个或多个线程等待,直到在其他线程中执行的一组操作完成。二、CountDownLatch俩种应用场景: 场景一:所有线程在等待开始信号(startSignal.await()),主流程发出开始信号通知,既执行startSignal.countDown()方法后;所有线程才开始执行;每个线程执行完发出做完信号,既执行do..._countdownluach于cyclicbarrier的用法
自动化监控系统Prometheus&Grafana_-自动化监控系统prometheus&grafana实战-程序员宅基地
文章浏览阅读508次。Prometheus 算是一个全能型选手,原生支持容器监控,当然监控传统应用也不是吃干饭的,所以就是容器和非容器他都支持,所有的监控系统都具备这个流程,_-自动化监控系统prometheus&grafana实战
React 组件封装之 Search 搜索_react search-程序员宅基地
文章浏览阅读4.7k次。输入关键字,可以通过键盘的搜索按钮完成搜索功能。_react search