全覆盖路径规划开源项目Clean-robot-turtlebot3原理及流程概括总结_clean_robot算法详解-程序员宅基地
技术标签: 运动规划 移动机器人 gazebo 扫地机器人 运动规划和控制 ROS 全覆盖路径规划 路径规划
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。
1、全覆盖路径规划开源项目Clean-robot-turtlebot3原理及流程概括总结
https://blog.csdn.net/qq_44339029/article/details/136880603
2、ROS坐标系常用坐标及其变换详细梳理
https://blog.csdn.net/qq_44339029/article/details/136671867
3、全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(上)
https://blog.csdn.net/qq_44339029/article/details/136879605
4、全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
https://blog.csdn.net/qq_44339029/article/details/136660766
一、相关介绍
Clean-robot-turtlebot3项目源码链接如下:
https://github.com/li-haojia/Clean-robot-turtlebot3
–
Clean-robot-turtlebot3效果演示如下:【图片来源于项目介绍】
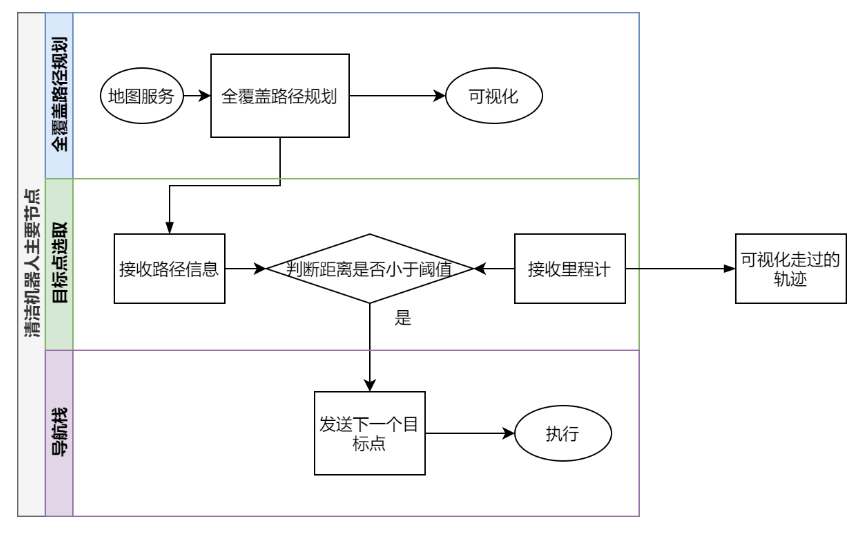
Clean-robot-turtlebot3系统结构如下:【图片来源于项目介绍】
二、Clean-robot-turtlebot3原理及实现流程概括总结
总的来说,Clean-robot-turtlebot3实现全覆盖清扫的流程可以分为初始化阶段、全覆盖路径规划阶段、执行覆盖阶段,这三个阶段,各个阶段的主要流程如下所示:
1、初始化阶段
在初始化阶段,通过类的构造函数CleaningPathPlanning(),及其调用或间接调用的initializeMats()、getCellMatAndFreeSpace()、initializeNeuralMat()、initializeCoveredGrid()等函数完成算法各项参数和数据结构的初始化。
在初始化阶段有几个变量需要重点注意一下,首先是使用costmap栅格地图来初始化的新地图变量srcMap_,这里的转换仅仅是进行格式的转换(srcMap_的数据类型是OpenCV常用的Mat类型),其尺寸、分辨率和代价值均与costmap栅格地图相同。
紧接着进一步按照设定的覆盖直径SIZE_OF_CELL,对srcMap_地图变量进行划分成一个个SIZE_OF_CELL x SIZE_OF_CELL个栅格大小的正方形区域。每个正方形区域将变成新地图cellMat_中的一个栅格,且若原地图中这个SIZE_OF_CELL x SIZE_OF_CELL个栅格的正方形区域中每个栅格均不存在障碍物,则认为转换后得到的新地图cellMat_中的这个栅格处没有障碍物,否则认为新地图中的这个栅格处有障碍物。
上述转换将原有地图稀疏化,即认为机器人每走过原地图中一个栅格就完成了对其周围SIZE_OF_CELL个栅格的覆盖,所以按照SIZE_OF_CELL对地图进行稀疏化后得到的新地图,可以更简便的进行后续的全覆盖路径的规划。此外,得到了新地图cellMat_后,进一步标记了出新地图的自由空间(无障碍物)的栅格,并将其坐标存储到freeSpaceVec_中,方便后续覆盖规划时查找是否还存在没有覆盖的无障碍区域。
最后,使用稀疏后的新地图cellMat_来初始化活力值地图neuralizedMat_,如果新地图中某个栅格处有障碍物,则其对应的活力值地图中存储一个较大的负数-100000,如果没有障碍物,则活力值地图中对应的位置存储的活力值为50/j,其中j是其所在的列数,这种活力值设置模式使得同一列无障碍物点的初始活力值相同,而随着所在列编号的增加,活力值依次降低,在后续的步骤中,机器人会倾向于向活力值高的区域移动,这样初始化活力值,将引导机器人按列形成从弓字型的覆盖路径,且避开障碍物。
2、全覆盖路径规划阶段
全覆盖路径规划阶段,核心程序在mainPlanningLoop()函数中,首先将机器人的当前位置作为全覆盖路径规划的起点,然后进行循环迭代,核心流程是,在每次迭代中,先计算机器人在当前点周围八个方向上相邻栅格(新地图中)的活动值,然后选择活动值最大的方向作为下一步的移动方向。然后按照该方向移动一个栅格,得到全覆盖路径中下一个点的位置,将其加入存储全覆盖路径的队列pathVec_中,并将该点坐标更新为新的当前点坐标,方便进行下一轮循环迭代信息。在特定条件下,还要处理距离关系,防止自锁现象,在当前点周围没有合适的点作为下一个路径点时,前往下一个区域继续规划。循环执行以上步骤,直到达到规划循环的最大次数或出现自锁现象(全覆盖路径规划完成)。
上述流程有两个关键地方,即如何计算活力值,以及当前点周围没有合适的点进行移动时,如何前往下一个区域继续规划。
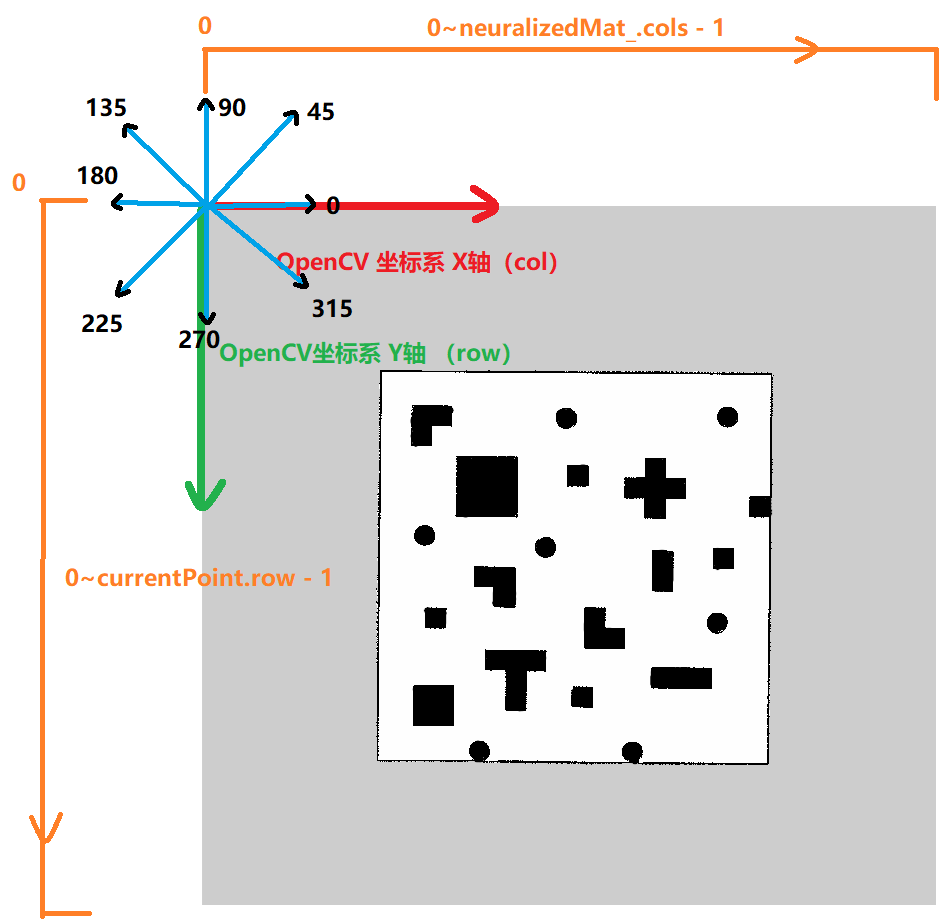
先来看如何计算活力值,基于当前点的位置(这里的当前点是指当前规划中的当前点,不是机器人的当前位置)在姿态角分别为0, 45, 90, 135, 180, 225, 270, 315这八个方向上计算这八个相邻栅格的活动值,具体而言,计算每个方向上活动值时,先计算当前方向角度与上一步的角度lasttheta之间的角度差deltaTheta,如果差值超过180度,进行调整,确保差值在0到180度之间。然后将其转换为当前方向的角度与上一步的角度的偏离程度e。e的值在0到1之间,极端的1表示方向相同,0表示方向相反。若沿当前方向移动一步后,会超出地图边界,则当前方向需要给一个很小的活力值,如程序中的v = -100000,来使机器人不要向该方向移动。若不会超出地图边界则采活力值的计算分为两种情况,对于0,90,180,270这四个横平竖直的移动方向,活力值由两部分构成,第一部分是从活力值地图neuralizedMat_中查询的沿当前方向移动一步后的位置的活力值,第二部分是c_0 * e,其中c_0 是常系数50。附加项 c_0 * e的作用是更倾向于选取与上一次移动方向相同或者相近的方向。对于所有对角方向,即45, 135, 225, 315这四个方向计算活力值时,后面还有一个附加项-200,这个-200的附加项的作用可能是尽量选取上下左右这四个方向,所以对对角的四个方向施加了额外的代价。沿着0度和45度方向的计算表达式如下所示
v = neuralizedMat_.at<float>(currentPoint.row, currentPoint.col + 1) + c_0 * e;
v = neuralizedMat_.at<float>(currentPoint.row - 1, currentPoint.col + 1) + c_0 * e - 200;
接下来介绍当前点周围没有合适的点进行移动时,如何前往下一个区域继续规划。在计算完当前点周围八个相邻点的活力值后,会进行判断,若他们这的最大活力值依然小于0,说明周围上下左右四个移动方向上的点要么是障碍物,要么已经在覆盖路径里面了,在该区域已经不能继续维持弓字形继续规划覆盖路径了,则考虑跳到另一个区域进行规划。
此时,需要依次遍历存储新地图无障碍点坐标的变量freeSpaceVec_中的点,查询该点的活力值,若活力值大于0,则找到了一个新的活跃的点,则进一步判断该点周围相邻的位置是否存在活力值为-250的点(即已经在覆盖路径中的点),若存在,则计算当前点与找到的这个活跃点之间的距离,如果这个距离小于当前的最小距离(初始化为一个较大值100000000),则更新最小距离及其索引,也就是在freeSpaceVec_中的位置,遍历完freeSpaceVec_中的点后,判断最小距离是否为初始化的100000000,若不是,则找到了距离当前点最近的活跃点,进行跳转,即更新当前点位置为该活跃点位置,并将其添加到路径点队列pathVec_中,继续在新的区域进行全覆盖路径的规划。若没有找到,则说明产生了自锁现象,已经完成对地图可行区域的全覆盖路径的规划,退出循环,结束规划。mainPlanningLoop()函数结束后,就得到了规划的全覆盖路径点存放在pathVec_中,然后赋值给GetPathInROS()中的变量cellvec,转换成合适的格式后以话题/path_planning_node /cleaning_plan_nodehandle/cleaning_path发布出去。
3、执行覆盖阶段
next_goal节点会接收上面发布的规划完成的全覆盖路径,然后依次发布这个全覆盖路径中的点作为目标点发送出去,当机器人当前位置与当前目标点位置小于阈值时,发送下一个。发送出去的目标点通过点对点的全局和局部规划算法进行跟踪来完成对地图的覆盖的,项目里面全局规划算法用的ROS提供的NavfnROS包中的Dijkstra算法。局部算法用的ROS提供的DWA算法。
三、换地图测试效果
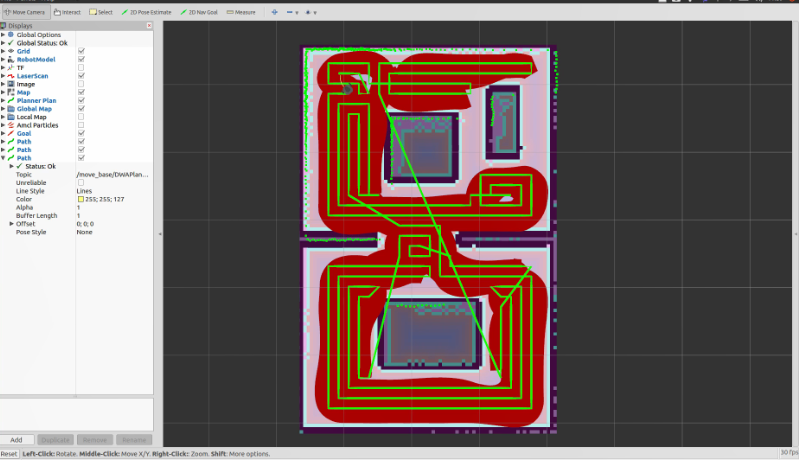
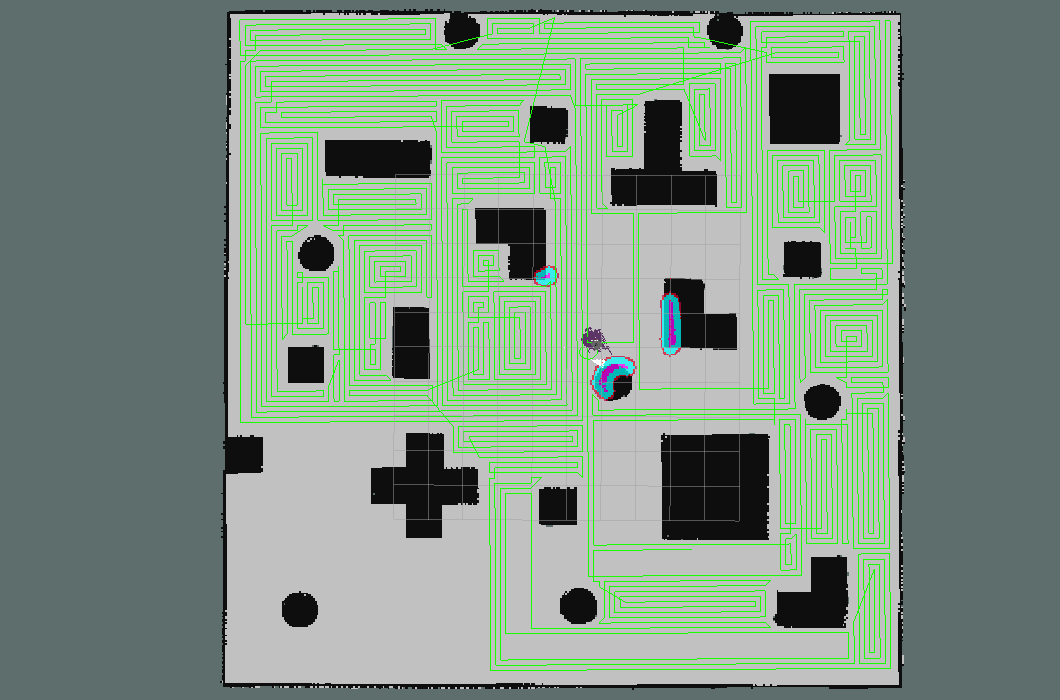
我使用自己的地图对该开源程序进行测试,发现算法存在一些缺陷,并不能完成对地图中所以可行区域的探索,有很大的空白区域,如下所示:
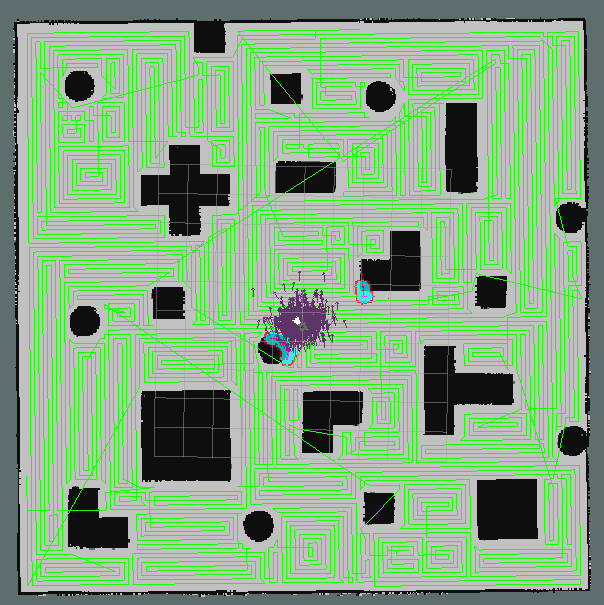
【2024-3-23纠正】:上述缺陷是由于原程序中设定的最大迭代次数过小导致的,将原来的9000增大到20000后,可完成对可行区域的覆盖,如下所示:
智能推荐
class和struct的区别-程序员宅基地
文章浏览阅读101次。4.class可以有⽆参的构造函数,struct不可以,必须是有参的构造函数,⽽且在有参的构造函数必须初始。2.Struct适⽤于作为经常使⽤的⼀些数据组合成的新类型,表示诸如点、矩形等主要⽤来存储数据的轻量。1.Class⽐较适合⼤的和复杂的数据,表现抽象和多级别的对象层次时。2.class允许继承、被继承,struct不允许,只能继承接⼝。3.Struct有性能优势,Class有⾯向对象的扩展优势。3.class可以初始化变量,struct不可以。1.class是引⽤类型,struct是值类型。
android使用json后闪退,应用闪退问题:从json信息的解析开始就会闪退-程序员宅基地
文章浏览阅读586次。想实现的功能是点击顶部按钮之后按关键字进行搜索,已经可以从服务器收到反馈的json信息,但从json信息的解析开始就会闪退,加载listview也不知道行不行public abstract class loadlistview{public ListView plv;public String js;public int listlength;public int listvisit;public..._rton转json为什么会闪退
如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet-程序员宅基地
文章浏览阅读219次。如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet
系统项目报表导出功能开发_积木报表 多线程-程序员宅基地
文章浏览阅读521次。系统项目报表导出 导出任务队列表 + 定时扫描 + 多线程_积木报表 多线程
ajax 如何从服务器上获取数据?_ajax 获取http数据-程序员宅基地
文章浏览阅读1.1k次,点赞9次,收藏9次。使用AJAX技术的好处之一是它能够提供更好的用户体验,因为它允许在不重新加载整个页面的情况下更新网页的某一部分。另外,AJAX还使得开发人员能够创建更复杂、更动态的Web应用程序,因为它们可以在后台与服务器进行通信,而不需要打断用户的浏览体验。在Web开发中,AJAX(Asynchronous JavaScript and XML)是一种常用的技术,用于在不重新加载整个页面的情况下,从服务器获取数据并更新网页的某一部分。使用AJAX,你可以创建异步请求,从而提供更快的响应和更好的用户体验。_ajax 获取http数据
Linux图形终端与字符终端-程序员宅基地
文章浏览阅读2.8k次。登录退出、修改密码、关机重启_字符终端
随便推点
Python与Arduino绘制超声波雷达扫描_超声波扫描建模 python库-程序员宅基地
文章浏览阅读3.8k次,点赞3次,收藏51次。前段时间看到一位发烧友制作的超声波雷达扫描神器,用到了Arduino和Processing,可惜啊,我不会Processing更看不懂人家的程序,咋办呢?嘿嘿,所以我就换了个思路解决,因为我会一点Python啊,那就动手吧!在做这个案例之前先要搞明白一个问题:怎么将Arduino通过超声波检测到的距离反馈到Python端?这个嘛,我首先想到了串行通信接口。没错!就是串口。只要Arduino将数据发送给COM口,然后Python能从COM口读取到这个数据就可以啦!我先写了一个测试程序试了一下,OK!搞定_超声波扫描建模 python库
凯撒加密方法介绍及实例说明-程序员宅基地
文章浏览阅读4.2k次。端—端加密指信息由发送端自动加密,并且由TCP/IP进行数据包封装,然后作为不可阅读和不可识别的数据穿过互联网,当这些信息到达目的地,将被自动重组、解密,而成为可读的数据。不可逆加密算法的特征是加密过程中不需要使用密钥,输入明文后由系统直接经过加密算法处理成密文,这种加密后的数据是无法被解密的,只有重新输入明文,并再次经过同样不可逆的加密算法处理,得到相同的加密密文并被系统重新识别后,才能真正解密。2.使用时,加密者查找明文字母表中需要加密的消息中的每一个字母所在位置,并且写下密文字母表中对应的字母。_凯撒加密
工控协议--cip--协议解析基本记录_cip协议embedded_service_error-程序员宅基地
文章浏览阅读5.7k次。CIP报文解析常用到的几个字段:普通类型服务类型:[0x00], CIP对象:[0x02 Message Router], ioi segments:[XX]PCCC(带cmd和func)服务类型:[0x00], CIP对象:[0x02 Message Router], cmd:[0x101], fnc:[0x101]..._cip协议embedded_service_error
如何在vs2019及以后版本(如vs2022)上添加 添加ActiveX控件中的MFC类_vs添加mfc库-程序员宅基地
文章浏览阅读2.4k次,点赞9次,收藏13次。有时候我们在MFC项目开发过程中,需要用到一些微软已经提供的功能,如VC++使用EXCEL功能,这时候我们就能直接通过VS2019到如EXCEL.EXE方式,生成对应的OLE头文件,然后直接使用功能,那么,我们上篇文章中介绍了vs2017及以前的版本如何来添加。但由于微软某些方面考虑,这种方式已被放弃。从上图中可以看出,这一功能,在从vs2017版本15.9开始,后续版本已经删除了此功能。那么我们如果仍需要此功能,我们如何在新版本中添加呢。_vs添加mfc库
frame_size (1536) was not respected for a non-last frame_frame_size (1024) was not respected for a non-last-程序员宅基地
文章浏览阅读785次。用ac3编码,执行编码函数时报错入如下:[ac3 @ 0x7fed7800f200] frame_size (1536) was not respected for anon-last frame (avcodec_encode_audio2)用ac3编码时每次送入编码器的音频采样数应该是1536个采样,不然就会报上述错误。这个数字并非刻意固定,而是跟ac3内部的编码算法原理相关。全网找不到,国内音视频之路还有很长的路,音视频人一起加油吧~......_frame_size (1024) was not respected for a non-last frame
Android移动应用开发入门_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量-程序员宅基地
文章浏览阅读230次,点赞2次,收藏2次。创建Android应用程序一个项目里面可以有很多模块,而每一个模块就对应了一个应用程序。项目结构介绍_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量