【STM32项目】- 人体检测(体温、心率、心跳、跌倒检测)_mpu6050人体-程序员宅基地
技术标签: stm32 心率血氧 STM32项目 人体检测 MPU6050 跌倒检测
STM32人体检测(体温、心率、心跳、跌倒检测)+zigbee (附开源)
笔者前言
该文章为基础版本 - 新版本已做优化 V2.0版本
跌倒检查系统V2.0版本
配套V2.0视频 制作教程
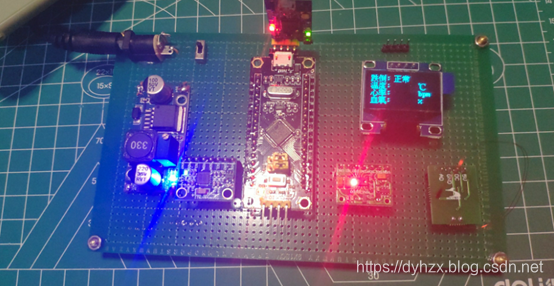
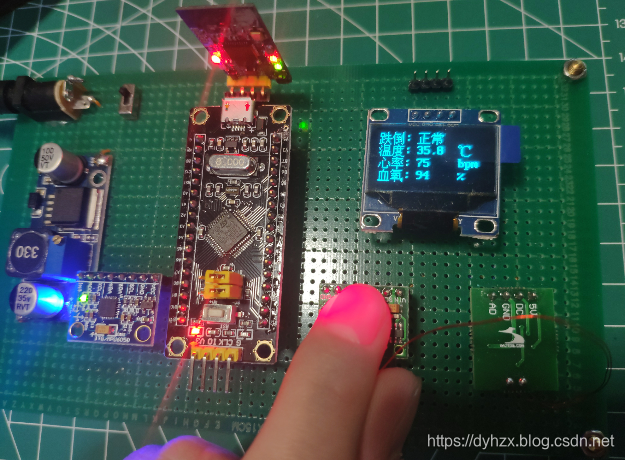
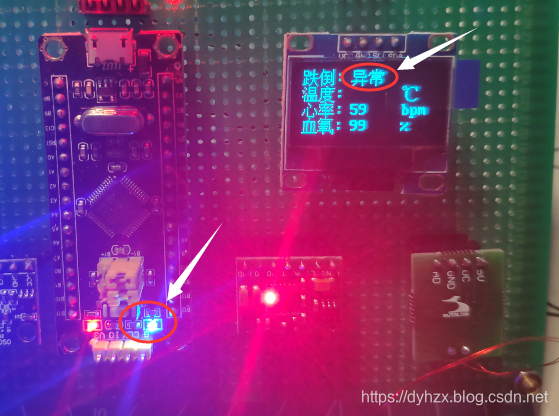
系统成品图
模块选用
-
STM32f103c8t6
-
0.96 oled IIC 模块
-
max30100心率血氧模块
-
mpu-6050模块
-
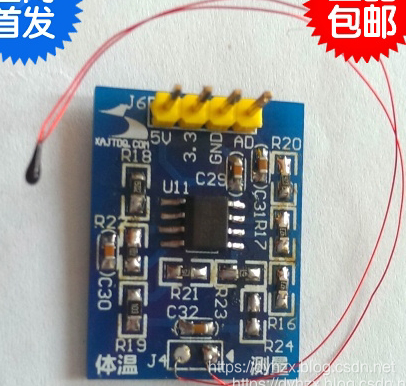
人体温度模块 (某宝54元买的价格有点贵哈)
-
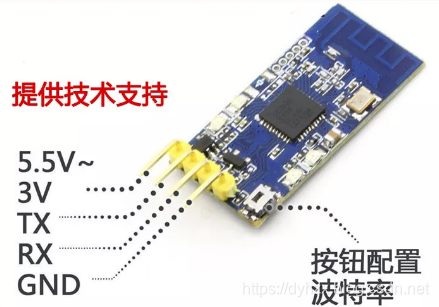
zigbee转串口模块
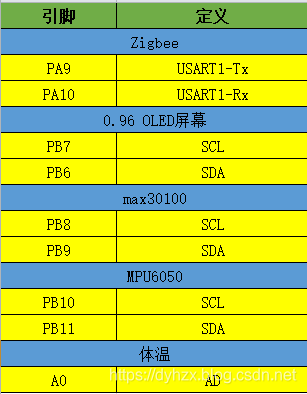
接线
功能概述
1.跌倒检测
*速度瞬态变化
人体加速度向量幅值SVM和微分加速度幅值的绝对平均值DSVM是区分人体运动状态的重要参量。SVM通过计算加速度幅度表征人体运动的剧烈程度,其值越大表明运动越剧烈。DSVM通过计算SVM的微分绝对值的时间平均表征人体运动状态变化的剧烈程度,其值越大表明运动状态变化越剧烈。其定义为:在动态坐标系下考察SVM和DSVM,可监测人体的运动强度和运动状态变化强度。

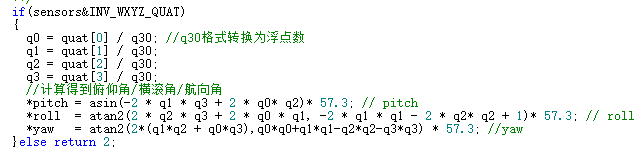
*姿态角判断
利用三轴加速度和重力的关系,经过四元运算测量得到 俯仰角、横滚角、航向角
mpu6050驱动上位机测试
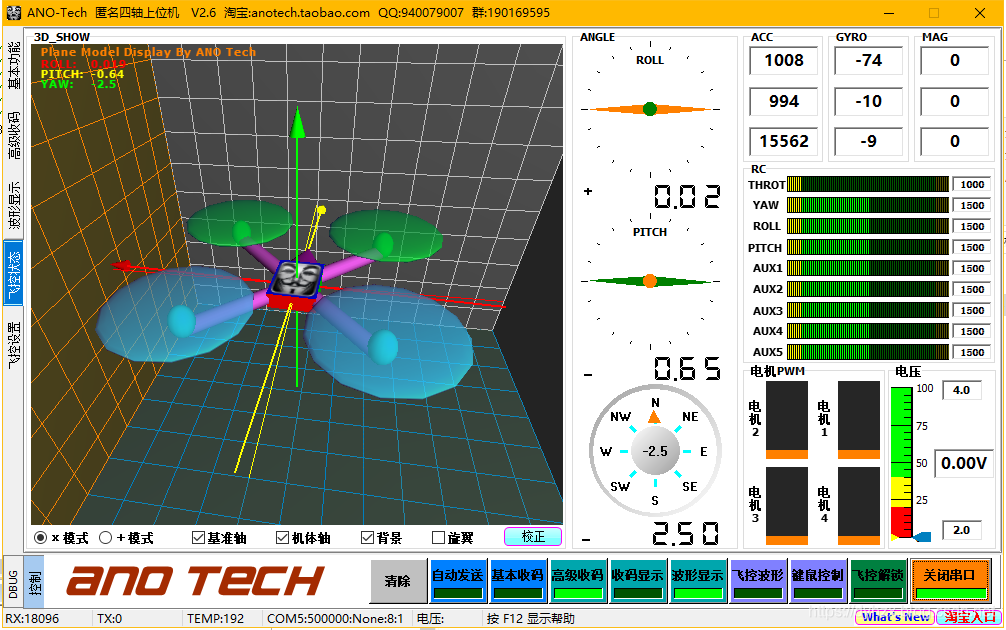
判定标准:
-
SVM正常状态下值是17000左右,当将其加速晃动时,分析得到的安全加速度约在12000~22000之间(模拟测试值,仅供参考),当超出阈值时,5秒内都判定为异常,且板载蓝色LED灯亮。
-
三轴欧拉偏角大于 40°时 即异常
人体体位的另一个重要特征就是身体的倾角,调查显示,人体处于直立状态时,躯干与重心方向的倾角小于60度;而人体处于水平状态时,倾角接近90度;人体在跌倒时,躯干从直立状态变为接近水平的状态。所以可以将人体倾角值是否大于60度来作为辅助判断跌倒的特征,倾角值可通过倾角传感器获得。
2.人体温度
线性区间温度30—44度/电压2.127–1.193V

获取温度流程:
- 模块AO输出捕获ADC平均有效值换算成电压值
- 根据驱动例程提供的数据表,用电压值匹配电阻表
- 电阻表匹配对应温度值
3.心率血氧浓度
当LED光射向皮肤,透过皮肤组织反射回的光被光敏传感器接受并转换成电信号再经过AD转换成数字信号,简化过程:光–> 电 --> 数字信号。根据官方历程移植代码,中途遇到很多问题,血氧的测量,相比心率血氧测量难度较大而且精度不算太高,寄存器中文描述可参考此链接
程序设计流程如下
- 先初始化IIC,再初始化血氧模块SPO2_Init()
- 检查样本,采样获取红外FIFO、红外FIFO 的AC值
- 对红外FIFO、红外FIFO过滤脉冲值
- 根据相应的算法 光电容积脉搏波描记法PPG 获取心跳速率、血氧浓度
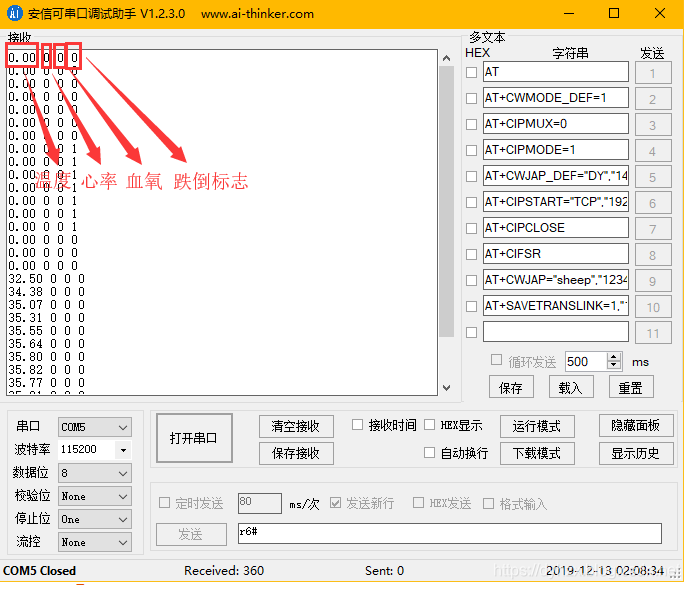
zigbee发送数据
USART -> zigbee只需要 串口 printf 就可以完成数据的传输
使用该模块前需要配置模块我这里配置的波特率是115200

注意:
- 温度测量范围是 30-44°,其他范围默认取值为零
- 心跳有效范围设置为20-300,血氧是百分比值0-100
- 跌倒标志位【0:正常 1:异常】
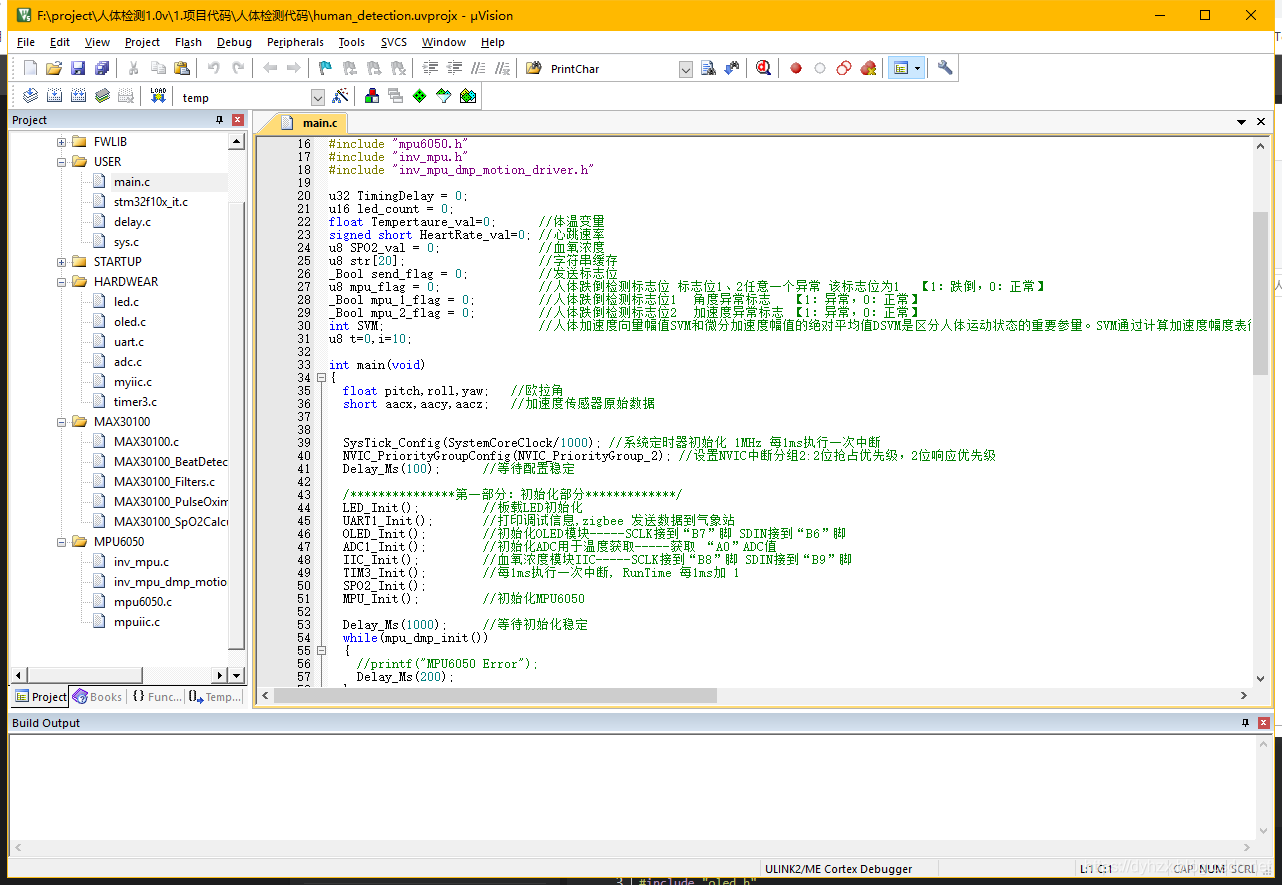
代码
main函数代码
#include "adc.h"
#include "led.h"
#include "oled.h"
#include "uart.h"
#include "math.h"
#include "delay.h"
#include "stdio.h"
#include "myiic.h"
#include "timer3.h"
#include "stdlib.h"
#include "MAX30100.h"
#include "stm32f10x.h"
#include "MAX30100_Filters.h"
#include "MAX30100_PulseOximeter.h"
#include "MAX30100_SpO2Calculator.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
u32 TimingDelay = 0;
u16 led_count = 0;
float Tempertaure_val=0; //体温变量
signed short HeartRate_val=0; //心跳速率
u8 SPO2_val = 0; //血氧浓度
u8 str[20]; //字符串缓存
_Bool send_flag = 0; //发送标志位
u8 mpu_flag = 0; //人体跌倒检测标志位 标志位1、2任意一个异常 该标志位为1 【1:跌倒,0:正常】
_Bool mpu_1_flag = 0; //人体跌倒检测标志位1 角度异常标志 【1:异常,0:正常】
_Bool mpu_2_flag = 0; //人体跌倒检测标志位2 加速度异常标志 【1:异常,0:正常】
int SVM; //人体加速度向量幅值SVM和微分加速度幅值的绝对平均值DSVM是区分人体运动状态的重要参量。SVM通过计算加速度幅度表征人体运动的剧烈程度,其值越大表明运动越剧烈。
u8 t=0,i=10;
int main(void)
{
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
SysTick_Config(SystemCoreClock/1000); //系统定时器初始化 1MHz 每1ms执行一次中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
Delay_Ms(100); //等待配置稳定
/***************第一部分:初始化部分*************/
LED_Init(); //板载LED初始化
UART1_Init(); //打印调试信息,zigbee 发送数据到气象站
OLED_Init(); //初始化OLED模块-----SCLK接到“B7”脚 SDIN接到“B6”脚
ADC1_Init(); //初始化ADC用于温度获取-----获取 “A0”ADC值
IIC_Init(); //血氧浓度模块IIC-----SCLK接到“B8”脚 SDIN接到“B9”脚
TIM3_Init(); //每1ms执行一次中断, RunTime 每1ms加 1
SPO2_Init();
MPU_Init(); //初始化MPU6050
Delay_Ms(1000); //等待初始化稳定
while(mpu_dmp_init())
{
//printf("MPU6050 Error");
Delay_Ms(200);
}
show_interface(); //显示主界面
/***************第二部分:数据显示更新部分*************/
while(1)
{
//====心跳血氧====
POupdate(); //更新FIFO数据 血氧数据 心率数据
//====温度获取====
Tempertaure_val = get_temp(); //获取人体温度
show_temp(Tempertaure_val); //屏幕显示温度
//====MPU6050数据获取====
if((t%10)==0)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
SVM = sqrt(pow(aacx,2)+ pow(aacy,2) + pow(aacz,2));
//printf("pitch:%0.1f roll:%0.1f yaw:%0.1f SVM:%u\r\n",fabs(pitch),fabs(roll),fabs(yaw),SVM);
//分析x、y、z角度的异常判断
if( fabs(pitch)>40 || fabs(roll)>40 || fabs(yaw)>40 )//倾斜角度的 【绝对值】 大于40°SVM大于设定的阈值时,即认为摔倒
mpu_1_flag = 1;
else
mpu_1_flag = 0;
//分析加速度SVM的异常判断
if( SVM>23000 || SVM<12000 )i = 0;
i++;
if( i<=10 )mpu_2_flag = 1;
else
{
i = 10;
mpu_2_flag = 0;
}
//综合欧拉角、SVM异常判断异常
if( mpu_2_flag || mpu_1_flag )mpu_flag = 1;
else mpu_flag = 0;
show_mpu(mpu_flag);
}
t=0;
}
t++;
//====发送数据====
if(send_flag)//SysTick_Handler()设置1s发送一次数据
{
printf("%0.2f %d %u %u\r\n",Tempertaure_val,HeartRate_val,SPO2_val,mpu_flag);
send_flag=!send_flag;
}
Delay_Ms(10);
}
}
/***************系统定时器中断函数*************/
void SysTick_Handler(void)
{
TimingDelay--; //延时函数所需的变量
led_count++; //每1s发送一次数据
if(led_count>=1000)
{
led_count=0;
send_flag=!send_flag;
}
}

有问题可以私聊我,如果能帮到你希望能点个赞支持一下
CSDN最新下载地址
百度下载: 提取码:lqho
智能推荐
苹果https java_apple登录 后端java实现最终版-程序员宅基地
文章浏览阅读298次。import com.alibaba.fastjson.JSONArray;import com.alibaba.fastjson.JSONObject;import com.auth0.jwk.Jwk;import com.helijia.appuser.modules.user.vo.AppleCredential;import com.helijia.common.api.model.Api..._com.auth0.jwk.jwk
NLP学习记录(六)最大熵模型MaxEnt_顺序潜在最大熵强化学习(maxent rl)-程序员宅基地
文章浏览阅读4.7k次。原理在叧掌握关于未知分布的部分信息的情况下,符合已知知识的概率分布可能有夗个,但使熵值最大的概率分布最真实地反映了事件的的分布情况,因为熵定义了随机变量的不确定性,弼熵值最大时,随机变量最不确定,最难预测其行为。最大熵模型介绍我们通过一个简单的例子来介绍最大熵概念。假设我们模拟一个翻译专家的决策过程,关于英文单词in到法语单词的翻译。我们的翻译决策模型p给每一个单词或短语分配一..._顺序潜在最大熵强化学习(maxent rl)
计算机毕业设计ssm科研成果管理系统p57gs系统+程序+源码+lw+远程部署-程序员宅基地
文章浏览阅读107次。计算机毕业设计ssm科研成果管理系统p57gs系统+程序+源码+lw+远程部署。springboot基于springboot的影视资讯管理系统。ssm基于SSM高校教师个人主页网站的设计与实现。ssm基于JAVA的求职招聘网站的设计与实现。springboot校园头条新闻管理系统。ssm基于SSM框架的毕业生离校管理系统。ssm预装箱式净水站可视化信息管理系统。ssm基于SSM的网络饮品销售管理系统。
Caused by: org.xml.sax.SAXParseException; lineNumber: 38; columnNumber: 9; cvc-complex-type.2.3: 元素_saxparseexception; linenumber: 35; columnnumber: 9-程序员宅基地
文章浏览阅读1.6w次。不知道大家有没有遇到过与我类似的报错情况,今天发生了此错误后就黏贴复制了报错信息“Caused by: org.xml.sax.SAXParseException; lineNumber: 38; columnNumber: 9; cvc-complex-type.2.3: 元素 'beans' 必须不含字符 [子级], 因为该类型的内容类型为“仅元素”。”然后就是一顿的百度啊, 可一直都没有找到..._saxparseexception; linenumber: 35; columnnumber: 9; cvc-complex-type.2.3:
计算机科学与技术创新创业意见,计算机科学与技术学院大学生创新创业工作会议成功举行...-程序员宅基地
文章浏览阅读156次。(通讯员 粟坤萍 2018-04-19)4月19日,湖北师范大学计算机科学与技术学院于教育大楼学院会议室1110成功召开大学生创新创业工作会议。参与本次会议的人员有党总支副书记黄海军老师,创新创业学院吴杉老师,计算机科学与技术学院创新创业活动指导老师,15、16、17级各班班主任及学生代表。首先吴杉老师介绍了“互联网+”全国大学生创新创业大赛的相关工作进度,动员各级班主任充分做好“大学生创新创业大..._湖北师范 吴杉
【Android逆向】爬虫进阶实战应用必知必会-程序员宅基地
文章浏览阅读1.1w次,点赞69次,收藏76次。安卓逆向技术是一门深奥且充满挑战的领域。通过本文的介绍,我们了解了安卓逆向的基本概念、常用工具、进阶技术以及实战案例分析。然而,逆向工程的世界仍然在不断发展和变化,新的技术和方法不断涌现。展望未来,随着安卓系统的不断更新和加固,逆向工程将面临更大的挑战。同时,随着人工智能和机器学习技术的发展,我们也许能够看到更智能、更高效的逆向工具和方法的出现。由于篇幅限制,本文仅对安卓逆向技术进行了介绍和案例分析。
随便推点
Python数据可视化之环形饼图_数据可视化绘制饼图或圆环图-程序员宅基地
文章浏览阅读1.1k次。制作饼图还需要下载pyecharts库,Echarts 是一个由百度开源的数据可视化,凭借着良好的交互性,精巧的图表设计,得到了众多开发者的认可。随着学习python的热潮不断增加,Python数据可视化也不停的被使用,那我今天就介绍一下Python数据可视化中的饼图。在我们的生活和学习中,编程是一项非常有用的技能,能够丰富我们的视野,为各行各业的领域提供了新的角度。环形饼图的制作并不难,主要是在于数据的打包和分组这里会有点问题,属性的标签可以去 这个网站进行修改。图中的zip压缩函数,并分组打包。_数据可视化绘制饼图或圆环图
SpringMVC开发技术~5~基于注解的控制器_jsp/servlet到controller到基于注解的控制器-程序员宅基地
文章浏览阅读325次。1 Spring MVC注解类型Controller和RequestMapping注释类型是SpringMVC API最重要的两个注释类型。基于注解的控制器的几个优点:一个控制器类可以控制几个动作,而一个实现了Controller接口的控制器只能处理一个动作。这就允许将相关操作写在一个控制器类内,从而减少应用类的数量基于注解的控制器的请求映射不需要存储在配置文件中,而是使用RequestM..._jsp/servlet到controller到基于注解的控制器
利用波特图来满足动态控制行为的要求-程序员宅基地
文章浏览阅读260次,点赞3次,收藏4次。相位裕量可以从增益图中的交越频率处读取(参见图2)。使用的开关频率、选择的外部元件(例如电感和输出电容),以及各自的工作条件(例如输入电压、输出电压和负载电流)都会产生巨大影响。图2所示为波特图中控制环路的增益曲线,其中提供了两条重要信息。对于图2所示的控制环路,这个所谓的交越频率出现在约80 kHz处。通过使用波特图,您可以查看控制环路的速度,特别是其调节稳定性。图2. 显示控制环路增益的波特图(约80 kHz时,达到0 dB交越点)。图3. 控制环路的相位曲线,相位裕量为60°。
Glibc Error: `_obstack@GLIBC_2.2.5‘ can‘t be versioned to common symbol ‘_obstack_compat‘_`_obstack@glibc_2.2.5' can't be versioned to commo-程序员宅基地
文章浏览阅读1.8k次。Error: `_obstack@GLIBC_2.2.5’ can’t be versioned to common symbol '_obstack_compat’原因:https://www.lordaro.co.uk/posts/2018-08-26-compiling-glibc.htmlThis was another issue relating to the newer binutils install. Turns out that all was needed was to initi_`_obstack@glibc_2.2.5' can't be versioned to common symbol '_obstack_compat
基于javaweb+mysql的电影院售票购票电影票管理系统(前台、后台)_电影售票系统javaweb-程序员宅基地
文章浏览阅读3k次。基于javaweb+mysql的电影院售票购票电影票管理系统(前台、后台)运行环境Java≥8、MySQL≥5.7开发工具eclipse/idea/myeclipse/sts等均可配置运行适用课程设计,大作业,毕业设计,项目练习,学习演示等功能说明前台用户:查看电影列表、查看排版、选座购票、查看个人信息后台管理员:管理电影排版,活动,会员,退票,影院,统计等前台:后台:技术框架_电影售票系统javaweb
分分钟拯救监控知识体系-程序员宅基地
文章浏览阅读95次。分分钟拯救监控知识体系本文出自:http://liangweilinux.blog.51cto.com0 监控目标我们先来了解什么是监控,监控的重要性以及监控的目标,当然每个人所在的行业不同、公司不同、业务不同、岗位不同、对监控的理解也不同,但是我们需要注意,监控是需要站在公司的业务角度去考虑,而不是针对某个监控技术的使用。监控目标1.对系统不间断实时监控:实际上是对系统不间..._不属于监控目标范畴的是 实时反馈系统当前状态