PX4装机教程(五)无人船(车)_在px4固体中如何设置差速船-程序员宅基地
前言
硬件:单体或双体船
实验录屏
https://www.bilibili.com/video/BV1wA411c7p3?spm_id_from=333.999.0.0
一、载具设置
单电机加转向舵设置载具如下:

双电机差速船设置载具如下
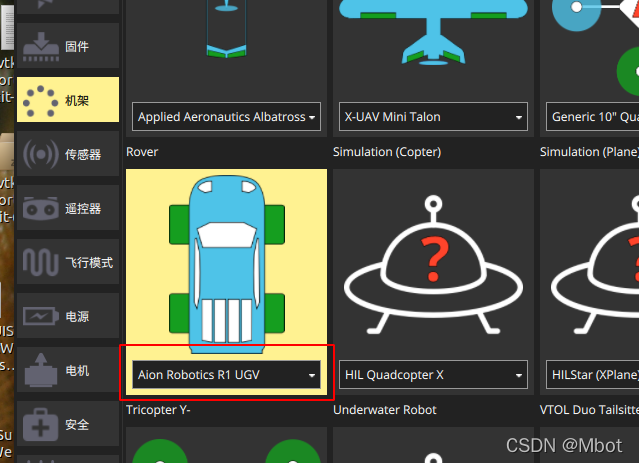
设置完毕后重新校准传感器
二、电机接线
单电机加舵的船的舵机接主通道2,电机接主通道4
双电机差速船的左边的电机接到主通道一,右边的电机接主通道二.
对于PIXHAWK4是IO PWM OUT(需要用转接板)口,对于其他飞控是MAIN通道
三、PWM输出设置
如果发现舵的转向是反的,可以修改PWM输出使其反向,将需要取反的通道置1并重启飞控即可
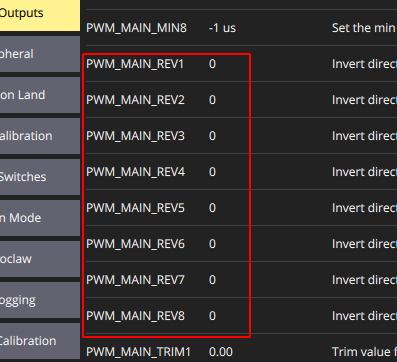
最低PWM值参数:PWM_MIN

未解锁PWM值参数:PWM_DISARMED
最大pwm值参数:PWM_MAX

有的电调是固定油门行程的,不支持飞控校准,因此需要根据油门的行程设置PWM参数,比如1000到1500是反转,1500到2000为正转,1500为停止,因此需要将最低的PWM值设置为1000,最大pwm为2000。
四、航点设置
设置起飞点
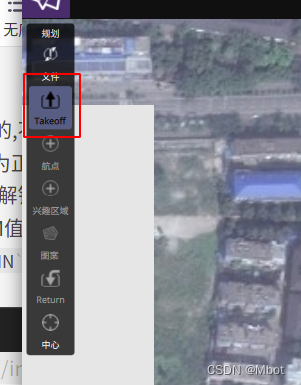
设置航点

点击上图航点选项,然后在地图上设置航点.设置完航点后,将takeoff点删除
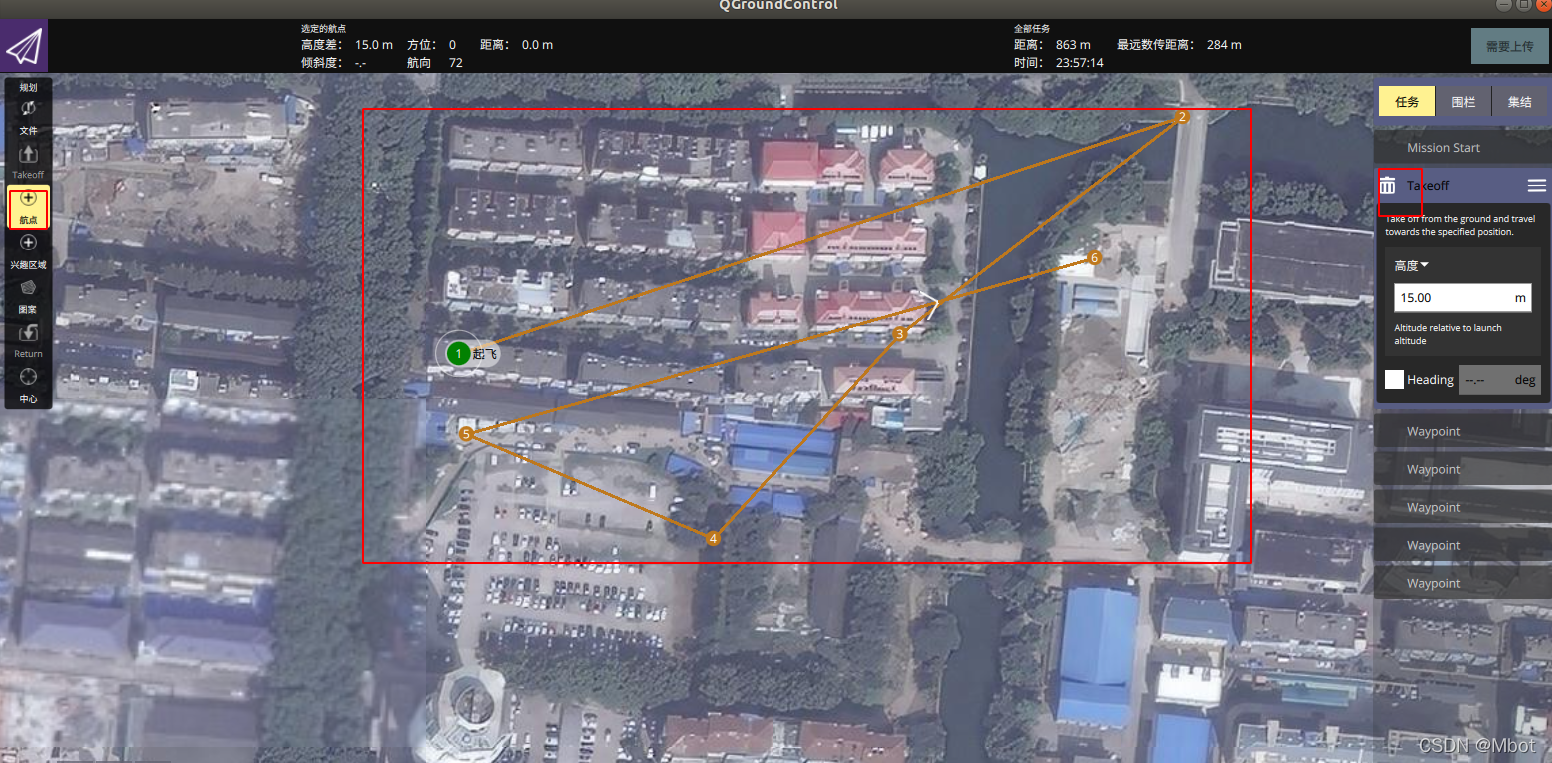
将航点的高度设置为0.然后点"需要上传"按钮将航点上传至无人船就可以了.

或者在地面站->软件设置里面勾选“任务不需要起飞项”,然后就可以不设置起飞点,直接设置航点了
智能推荐
时间管理类APP分析:拇指时间-程序员宅基地
文章浏览阅读1.1w次,点赞2次,收藏19次。就目前市场来看,时间管理类应用,大致分为划分为:行程管理、任务管理和备忘管理三种类型。市场上,这三种类型的产品百花齐放,做细分市场的,做垂直人群的不断在增加。今天,我们来看看“日历”,这个可以囊括行程管理、任务管理和备忘管理的工具。数据显示,从07年到15年的,人们对PC日历的需求越来越大,为了方便用户,日历APP在此基础上开始衍生。 APP因手机、平板等电子化设备携带方便,在各使用场景中占有优势_时间管理类app用户调研
MySQL-程序员宅基地
文章浏览阅读371次。1、初识MySQLjavaEE:企业级java开发 Webweb分为 :前端(页面:展示(数据库里的数据))后台 (连接点:链接数据库JDBC,链接前端(做控制,控制试图跳转,和给前端传递数据))数据库 (存数据,txt,Excel,world)只会写代码的码农是基本的,学好数据库; 基本混饭吃学习操作系统,学习数据结构与算法! 当一个不错的程序员离散数学,数字电路,网站体系结构,编译原理。+实战经验 = 优秀的程序员1.1、为什么学习数据库岗位需求现在的世界,大数据时代,
Bug的生命周期状态流程图_bug生命周期流程图-程序员宅基地
文章浏览阅读4.3k次,点赞2次,收藏8次。bug的生命周期BUG的生命周期,就是一个BUG被发现到这个BUG被关闭的过程。生命周期中缺陷状态:新建-->指派-->已解决-->待验-->关闭发现BUG-->提交BUG-->指派BUG-->研发确认BUG-->研发去修复BUG-->回归验证BUG-->是否通过验证-->关闭BUG如果待验的BUG在验证时没有解决好,我们需要重新打开--指派—已解决—待验,循环这个过程。中间其他状态:拒绝、延期等_bug生命周期流程图
Pandas对行/列求和_pandas对具体列求和-程序员宅基地
文章浏览阅读5.3k次,点赞3次,收藏18次。Pandas对行/列求和_pandas对具体列求和
Visio--用例图、类图、顺序图、活动图_visio画用例图-程序员宅基地
文章浏览阅读1.9w次,点赞32次,收藏228次。做个小结。_visio画用例图
程序员的路----程序员一定要仔细看_程序员的道路-程序员宅基地
文章浏览阅读2.2k次。在网上看到的恶搞程序员的图片,实在是搞笑。看一次笑一次!程序猿的十年他不是乞丐,请尊称他为程序猿。对,他就是程序猿!其实,你们看到的不是僵尸,他们都是苦逼的程序猿!这不是恶搞的,是一个真实的故事!看他的拐杖,其实也挺可怜的!不知是不是敲代码敲多了,把脚敲颓了!_程序员的道路
随便推点
C# 读取Word 表格数据(单元格纵合并)_vc++ ole 判断word表格单元格是否合并-程序员宅基地
文章浏览阅读9.4k次。对于word中存在合并单元格的表格: 下图是对Cells遍历的结果,True表示该行该列的单元格存在,False表示不存在。_vc++ ole 判断word表格单元格是否合并
java面向对象--内部类-程序员宅基地
文章浏览阅读55次。将一个类定义在另一个类里面,里面的那个类称为内部类,与属性、方法等一样视作外部类的成员。内部类提供了更好的封装,不允许同包中的其他类访问该内部类。内部类作为外部类的成员,同样可以被4个访问限定符修饰。如果外部类需要访问非静态内部类的成员,必须创建非静态内部类对象来访问。内部类成员可以直接访问外部类的数据。如果存在一个非静态内部类对象,则一定存在一个被它寄存的外部类对象,也就是说在拥有外...
深入浅出 FlatBuffers 之 Schema-程序员宅基地
文章浏览阅读1.3k次。一. FlatBuffers 是什么?FlatBuffers 是一个序列化开源库,实现了与 Protocol Buffers,Thrift,Apache Avro,SBE 和 Cap'n Proto 类似的序列化格式,主要由 Wouter van Oortmerssen 编写,并由 Google 开源。Oortmerssen 最初为 Android 游戏和注重性能的应用而开发了FlatBuffe..._flatbuffers64位
IT发展方向_it以后的几个方向-程序员宅基地
文章浏览阅读626次。自己的IT发展方向。1.做T型进化,横向做语言(java、python)的扩展,纵向主要是算法、模式、计算机原理。2.多系统的学习,WINDOW和LINUX的基本操作及维护。3.尽量做产品,少做项目,提高自己的竞争力。4.外语学习,日语是工作方面,英语是学习方面。坚持做自己喜欢的事。_it以后的几个方向
计算机考研408每日一题 day78_命中率高且电路实现简单的cache内存映射方式-程序员宅基地
文章浏览阅读392次。对于二叉排序树,下面的说法 ___是正确的。(华南理工大学 2006年)设备驱动程序在读写磁盘数据时一般釆用下列哪种I/O方式?(中国科学院大学 2018)下列___交换技术是独占信道工作方式。(中南大学 2006年)命中率高且电路实现简单的Cache 与内存映射方式是___映射方式。(中国科学院大学 2015)_命中率高且电路实现简单的cache内存映射方式
Unhandled exceptions: java.lang.IllegalAccessException, java.lang.reflect.InvocationTargetException_unhandled exceptions: java.lang.instantiationexcep-程序员宅基地
文章浏览阅读3.2k次。可能是没有异常处理,只需要加上throws Exception就解决问题了。_unhandled exceptions: java.lang.instantiationexception, java.lang.illegalacc