74HC595驱动点阵屏(24_24)_74hc595上电瞬间引脚有输出-程序员宅基地
项目开发中遇到的问题:
1、上电瞬间点阵屏显示乱码问题:
猜测:由于BK3431Q芯片加电时所有I/O为高电平,加电时可能595上电比BK3431Q快,所以上电被认为是一个正脉冲跳变,结果595内部的寄存器初始值被输出,网上看论坛别人给出的解决方案如下:
1.试试RCK反相后再进595,这样BK3431Q上电时的脉冲反相后成为负的,使595不输出.
2.OE用单片机I/O控制,由于上电时BK3431Q为高电平,所以无输出,然后程序控制595输出.
3.加大C26的值,让595的OE输出比51复位慢.
加粗的是本人采用的解决办法
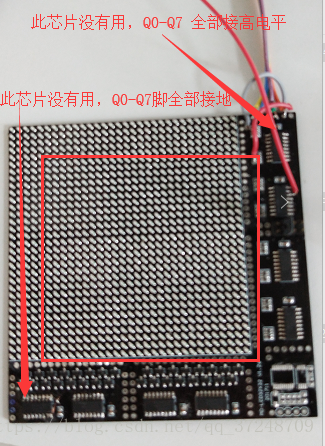
硬件电路图:

点阵屏是在网上购置的现成的32*32的点阵改的24*24,行低电平灯亮,列高电平灯亮(由于列用到了MOS管反向,实际控制中单片机的相应位送低电平)
由于硬件上的限制,此点阵屏只能列扫描,mos管才能发挥作用,如若用行扫描,led灯显示亮度会很弱
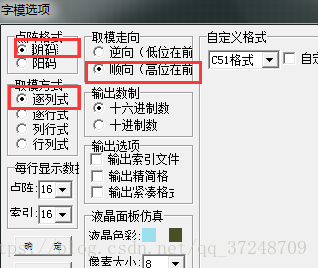
字模取模方式如下图所示:
74hc595Led.c源代码:
#include "gpio.h"
#include "74hc595Led.h"
#include "BK3435_reg.h"
#include "uart.h"
#include "app_task.h"
#define HC595_SH_CLK 0X13 //74HC595的时钟
#define HC595_DS_DATA 0X33 //74HC595的数据
#define HC595_ST_LATCH 0x12 //74HC595的锁存
#define SCL_HIGH() gpio_set(HC595_SH_CLK,1)
#define SCL_LOW() gpio_set(HC595_SH_CLK,0)
#define SDA_HIGH() gpio_set(HC595_DS_DATA,1)
#define SDA_LOW() gpio_set(HC595_DS_DATA,0)
#define LATCH_HIGH() gpio_set(HC595_ST_LATCH,1)
#define LATCH_LOW() gpio_set(HC595_ST_LATCH,0)
#define SDA_SetInput() gpio_config(HC595_DS_DATA,INPUT,PULL_NONE)
#define SDA_SetOutput() gpio_config(HC595_DS_DATA,OUTPUT,PULL_NONE)
#define SDA_READ() gpio_get_input(HC595_DS_DATA)
bool StartDelayFlag = 0; // 1表示延时 0 表示不延时
DisplayTag DisplayTagFlag = NoFlag;
//uint8_t TempBuf[48] = {0};
bool DisplayModeChangeFlag = 0;
DisplayContent DisplayBuf[ARRAY_RANK_NUM] =
{
{
RIGHT2LEFT_COLUMN_SCAN_DISPLAY_MODE,
5,
0x01,
#if 1
{0x00,0x00,0x00,0x00,0x00,0x08,0x00,0xE1,0x8C,0x01,0x23,0x88,0x06,0x25,0x18,0x38,
0x59,0x10,0x10,0x61,0x10,0x01,0xC2,0x20,0x01,0x82,0x20,0x01,0x00,0x20,0x03,0xFF,
0xFE,0x01,0xFF,0xFE,0x01,0x00,0x40,0x01,0x01,0x80,0x01,0x06,0x00,0x3F,0xFC,0x00,
0x3E,0x08,0x00,0x01,0x0C,0x00,0x01,0x07,0x04,0x01,0x03,0x06,0x03,0xFF,0xFE,0x03,
0xFF,0xFC,0x00,0x00,0x00,0x00,0x00,0x00}/*"纳",0*/
/* (24 X 24 , 宋体 ) */
#else
{0x40,0x00,0x02,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}/*"未命名文件",0*/
/* (24 X 24 ) */
#endif
},
{
DOWN2UP_LINE_SCAN_DISPLAY_MODE,
5,
0x1,
{0x00,0x00,0x00,0x00,0x00,0x80,0x01,0x01,0x00,0x01,0x06,0x00,0x21,0x08,0x00,0x1D,
0x3F,0xFE,0x09,0xF0,0x00,0x03,0x98,0x00,0x01,0x0E,0x00,0x01,0x00,0x80,0x01,0x10,
0x80,0x21,0x10,0x80,0x19,0x10,0x80,0x1D,0x10,0x80,0x01,0xFF,0xFE,0x01,0xFF,0xFE,
0x06,0x10,0x80,0x19,0x10,0x80,0x31,0x10,0x80,0x21,0x30,0x80,0x02,0x11,0x00,0x00,
0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00}/*"祥",0*/
/* (24 X 24 , 宋体 ) */
},
{
UP2DOWN_LINE_SCAN_DISPLAY_MODE,
5,
0x01,
{0x00,0x00,0x00,0x00,0x00,0x20,0x08,0x40,0x40,0x08,0x41,0x80,0x08,0x46,0x00,0x08,
0x5C,0x00,0x1F,0xFF,0xFE,0x1F,0xFF,0xFE,0x10,0x48,0x00,0x30,0x8C,0x00,0x10,0x86,
0x80,0x00,0x00,0x80,0x00,0x20,0x80,0x04,0x10,0x80,0x03,0x1C,0x80,0x03,0x01,0x00,
0x00,0x01,0x00,0x00,0x01,0x00,0x3F,0xFF,0xFE,0x20,0x01,0x00,0x00,0x02,0x00,0x00,
0x06,0x00,0x00,0x02,0x00,0x00,0x00,0x00}/*"科",0*/
/* (24 X 24 , 宋体 ) */
},
{
LEFT2RIGHT_COLUMN_SCAN_DISPLAY_MODE,
5,
0x01,
{0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x00,0x01,0x04,0x04,0x01,0x04,0x06,0x7F,
0xFF,0xFE,0x3F,0xFF,0xFC,0x21,0x08,0x00,0x02,0x10,0x02,0x02,0x10,0x02,0x01,0x10,
0x02,0x01,0x10,0x04,0x01,0x1C,0x08,0x01,0x13,0x08,0x01,0x10,0xD0,0x3F,0xF0,0x30,
0x21,0x10,0x70,0x01,0x11,0xC8,0x01,0x17,0x0C,0x01,0x1C,0x04,0x02,0x10,0x06,0x02,
0x00,0x06,0x00,0x00,0x04,0x00,0x00,0x00}/*"技",0*/
/* (24 X 24 , 宋体 ) */
}
};
uint8_t Mould[3]; //控制该列的取模值,低电平亮灯,每个模组16行,占2字节 //行
uint8_t upright[3]; //控制某一列,高电平亮灯,每个模组16列,占2字节 //列
uint8_t LED2X64[LED2X64LEN] = {0}; //开辟缓存空间,被定时器随时调用。每列两个字节,多加2个用于移位操作。
uint8_t DisplayTotal =0; //根据APP 发过来的数据随时改变
uint8_t CharDisplayInd1 = 0; //记录汉字索引
uint8_t CharDisplayInd2 = 0; //记录汉字点阵索引
ScanDisplay StartDisplayFlag = NoScan;
uint8_t DelayDisplayNextNUM = 0;
uint8_t DelayDisplayNextNumLimit = 0;
//======================================================================================
//发送数据到595芯片
//======================================================================================
void HC595WriteLineScan(void) //74HC595发送数据。行用来扫描
{
uint8_t i,j=1;
static uint8_t DisplayInd_1 = 0;
static uint32_t kkk_1=0x1; //用于16行轮流控制 这个初始值决定从哪一行开始扫描
//Mould[3]=~LED2X64[DisplayInd_1+3]; //i=0,把缓存的第01号字节发送到第一个模组的最右边的8位。
Mould[2]=~LED2X64[DisplayInd_1+2];
Mould[1]=~LED2X64[DisplayInd_1+1]; //i=0,把缓存的第01号字节发送到第一个模组的最右边的8位。
Mould[0]=~LED2X64[DisplayInd_1+0]; //i=0,把缓存的第00号字节发送到第一个模组的最左边的8位。
//upright[3]=~((kkk_1>>24)&0xff);
upright[2]=~((kkk_1>>16)&0xff);
upright[1]=~((kkk_1>>8)&0xff); //16位变量KKK,取高8位。控制第一个模组的0~7行。
upright[0]=~(kkk_1&0xff); //16位变量KKK,取低8位。控制第一个模组的8~15行。
//循环控制0~16行
if(kkk_1&0x800000)
kkk_1 = (kkk_1<<1)|0x01;
else
kkk_1 = (kkk_1<<1);
DisplayInd_1+=3;
DisplayInd_1=DisplayInd_1%72;
SDA_HIGH();
SCL_HIGH();
LATCH_LOW();
for(i=0;i<8;i++) //发送给每个模组的 U4 ,低电平整行可以亮,高电平整行全灭。
{
SCL_LOW();
//if (Mould[j*3-3]&0x80)
if (Mould[j*3-3]&0x01)
SDA_HIGH();
else
SDA_LOW();
//Mould[j*3-3]<<=1;
Mould[j*3-3]>>=1;
SCL_HIGH();
}
for(i=0;i<8;i++) //发送给每个模组的 U3 ,低电平整行可以亮,高电平整行全灭。
{
SCL_LOW();
//if (Mould[j*3-2]&0x80)
if (Mould[j*3-2]&0x01)
SDA_HIGH();
else
SDA_LOW();
//Mould[j*3-2]<<=1;
Mould[j*3-2]>>=1;
SCL_HIGH();
}
for(i=0;i<8;i++) //发送给每个模组的 U4 ,低电平整行可以亮,高电平整行全灭。
{
SCL_LOW();
//if (Mould[j*3-1]&0x80)
if (Mould[j*3-1]&0x01)
SDA_HIGH();
else
SDA_LOW();
//Mould[j*3-1]<<=1;
Mould[j*3-1]>>=1;
SCL_HIGH();
}
for(i=0;i<8;i++) //发送给每个模组的 U2 ,高电平整列可以亮,低电平整列灭。
{
SCL_LOW(); //时钟拉低
//if(upright[j*3-1]&0x1) //从最后一个字节开始,先高位后低位。
if(upright[j*3-1]&0x80)
SDA_HIGH();
else
SDA_LOW();
//upright[j*3-1]>>=1; //字节左移
upright[j*3-1]<<=1;
SCL_HIGH(); //时钟上升沿拷贝
}
for(i=0;i<8;i++) //发送给每个模组的 U1 ,高电平整列可以亮,低电平整列灭。
{
SCL_LOW();
//if (upright[j*3-2]&0x1) //先送低位
if (upright[j*3-2]&0x80)
SDA_HIGH();
else
SDA_LOW();
//upright[j*3-2]>>=1;
upright[j*3-2]<<=1;
SCL_HIGH();
}
for(i=0;i<8;i++) //发送给每个模组的 U2 ,高电平整列可以亮,低电平整列灭。
{
SCL_LOW(); //时钟拉低
//if(upright[j*3-3]&0x1) //从最后一个字节开始,先高位后低位。
if(upright[j*3-3]&0x80)
SDA_HIGH();
else
SDA_LOW()智能推荐
WCE Windows hash抓取工具 教程_wce.exe -s aaa:win-9r7tfgsiqkf:0000000000000000000-程序员宅基地
文章浏览阅读6.9k次。WCE 下载地址:链接:https://share.weiyun.com/5MqXW47 密码:bdpqku工具界面_wce.exe -s aaa:win-9r7tfgsiqkf:00000000000000000000000000000000:a658974b892e
各种“网络地球仪”-程序员宅基地
文章浏览阅读4.5k次。Weather Globe(Mackiev)Google Earth(Google)Virtual Earth(Microsoft)World Wind(NASA)Skyline Globe(Skylinesoft)ArcGISExplorer(ESRI)国内LTEarth(灵图)、GeoGlobe(吉奥)、EV-Globe(国遥新天地) 软件名称: 3D Weather Globe(http:/_网络地球仪
程序员的办公桌上,都出现过哪些神奇的玩意儿 ~_程序员展示刀,产品经理展示枪-程序员宅基地
文章浏览阅读1.9w次,点赞113次,收藏57次。我要买这些东西,然后震惊整个办公室_程序员展示刀,产品经理展示枪
霍尔信号、编码器信号与电机转向-程序员宅基地
文章浏览阅读1.6w次,点赞7次,收藏63次。霍尔信号、编码器信号与电机转向从电机出轴方向看去,电机轴逆时针转动,霍尔信号的序列为编码器信号的序列为将霍尔信号按照H3 H2 H1的顺序组成三位二进制数,则霍尔信号翻译成状态为以120°放置霍尔为例如不给电机加电,使用示波器测量三个霍尔信号和电机三相反电动势,按照上面所说的方向用手转动电机得到下图① H1的上升沿对应电机q轴与H1位置电角度夹角为0°,..._霍尔信号
个人微信淘宝客返利机器人搭建教程_怎么自己制作返利机器人-程序员宅基地
文章浏览阅读7.1k次,点赞5次,收藏36次。个人微信淘宝客返利机器人搭建一篇教程全搞定天猫淘宝有优惠券和返利,仅天猫淘宝每年返利几十亿,你知道么?技巧分享:在天猫淘宝京东拼多多上挑选好产品后,按住标题文字后“复制链接”,把复制的淘口令或链接发给机器人,复制机器人返回优惠券口令或链接,再打开天猫或淘宝就能领取优惠券啦下面教你如何搭建一个类似阿可查券返利机器人搭建查券返利机器人前提条件1、注册微信公众号(订阅号、服务号皆可)2、开通阿里妈妈、京东联盟、拼多多联盟一、注册微信公众号https://mp.weixin.qq.com/cgi-b_怎么自己制作返利机器人
【团队技术知识分享 一】技术分享规范指南-程序员宅基地
文章浏览阅读2.1k次,点赞2次,收藏5次。技术分享时应秉持的基本原则:应有团队和个人、奉献者(统筹人)的概念,同时匹配团队激励、个人激励和最佳奉献者激励;团队应该打开工作内容边界,成员应该来自各内容方向;评分标准不应该过于模糊,否则没有意义,应由客观的基础分值以及分团队的主观综合结论得出。应有心愿单激励机制,促进大家共同聚焦到感兴趣的事情上;选题应有规范和框架,具体到某个小类,这样收获才有目标性,发布分享主题时大家才能快速判断是否是自己感兴趣的;流程和分享的模版应该有固定范式,避免随意的格式导致随意的内容,评分也应该部分参考于此;参会原则,应有_技术分享
随便推点
O2OA开源企业办公开发平台:使用Vue-CLI开发O2应用_vue2 oa-程序员宅基地
文章浏览阅读1k次。在模板中,我们使用了标签,将由o2-view组件负责渲染,给o2-view传入了两个参数:app="内容管理数据"和name="所有信息",我们将在o2-view组件中使用这两个参数,用于展现“内容管理数据”这个数据应用下的“所有信息”视图。在o2-view组件中,我们主要做的事是,在vue组件挂载后,将o2的视图组件,再挂载到o2-view组件的根Dom对象。当然,这里我们要在我们的O2服务器上创建好数据应用和视图,对应本例中,就是“内容管理数据”应用下的“所有信息”视图。..._vue2 oa
[Lua]table使用随笔-程序员宅基地
文章浏览阅读222次。table是lua中非常重要的一种类型,有必要对其多了解一些。
JAVA反射机制原理及应用和类加载详解-程序员宅基地
文章浏览阅读549次,点赞30次,收藏9次。我们前面学习都有一个概念,被private封装的资源只能类内部访问,外部是不行的,但这个规定被反射赤裸裸的打破了。反射就像一面镜子,它可以清楚看到类的完整结构信息,可以在运行时动态获取类的信息,创建对象以及调用对象的属性和方法。
Linux-LVM与磁盘配额-程序员宅基地
文章浏览阅读1.1k次,点赞35次,收藏12次。Logical Volume Manager,逻辑卷管理能够在保持现有数据不变的情况下动态调整磁盘容量,从而提高磁盘管理的灵活性/boot分区用于存放引导文件,不能基于LVM创建PV(物理卷):基于硬盘或分区设备创建而来,生成N多个PE,PE默认大小4M物理卷是LVM机制的基本存储设备,通常对应为一个普通分区或整个硬盘。创建物理卷时,会在分区或硬盘的头部创建一个保留区块,用于记录 LVM 的属性,并把存储空间分割成默认大小为 4MB 的基本单元(PE),从而构成物理卷。
车充产品UL2089安规测试项目介绍-程序员宅基地
文章浏览阅读379次,点赞7次,收藏10次。4、Dielecteic voltage-withstand test 介电耐压试验。1、Maximum output voltage test 输出电压试验。6、Resistance to crushing test 抗压碎试验。8、Push-back relief test 阻力缓解试验。7、Strain relief test 应变消除试验。2、Power input test 功率输入试验。3、Temperature test 高低温试验。5、Abnormal test 故障试验。
IMX6ULL系统移植篇-系统烧写原理说明_正点原子 imx6ull nand 烧录-程序员宅基地
文章浏览阅读535次。镜像烧写说明_正点原子 imx6ull nand 烧录