AIoT应用创新大赛-基于TencentOS Tiny 的遥控小车_智能小车连接腾讯云平台-程序员宅基地
技术标签: TencentOS Tiny
AIoT应用创新大赛-基于TencentOS Tiny 的遥控小车 - 云+社区 - 腾讯云![]() https://cloud.tencent.com/developer/article/1951791
https://cloud.tencent.com/developer/article/1951791
一,项目介绍。
很早就有做个智能小车的想法,但由于时间有限和囊中羞涩,一直没有付出行动,感谢腾讯TencentOS Tiny团队的信任,给了这么一次机会,虽然离自己的设想的功能还差很多,但至少迈出了重要的一步,更重要的是能学习TencentOS Tiny实时操作系统 和i.MX RT系列应用处理器,在此表示感谢。
最初的设想是能做个可以实时传输视频的巡检车,但是由于项目时间和目前硬件限制,目前只能说是做了个基于TencentOS Tiny 的遥控小车。主要实现了以下功能:
- 基于腾讯云平台,利用腾讯连连H5面板来控制小车动作。
- 小车的行驶,包括前进、后退、左转向、右转向。
- 小车避障,利用超声波模块测距,前进过程中,当距离小于30厘米,小车自动刹车,停止前进。
- 实时上报前方障碍物的距离,在H5面板中显示。
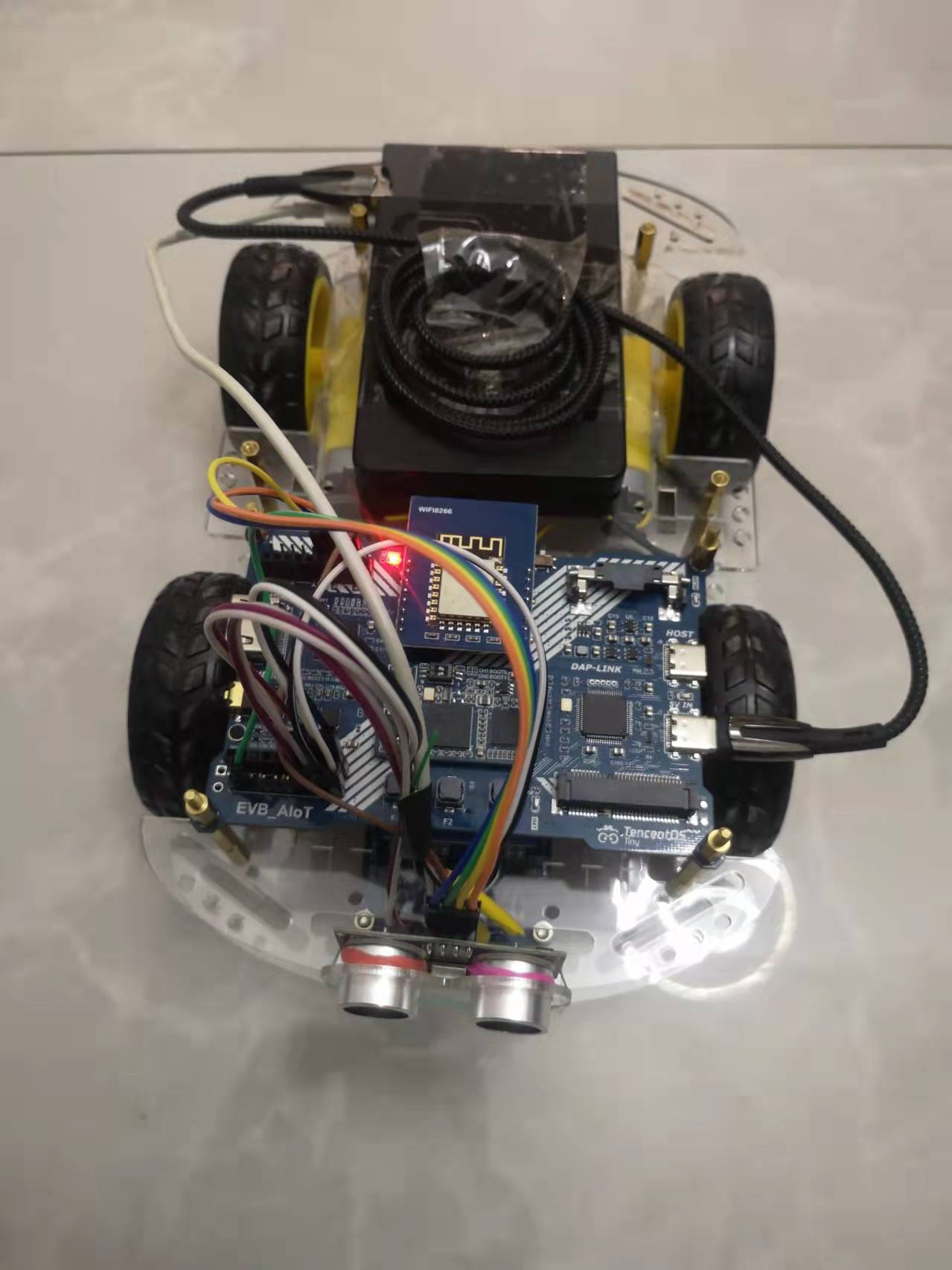
遥控小车
二,项目整体架构图
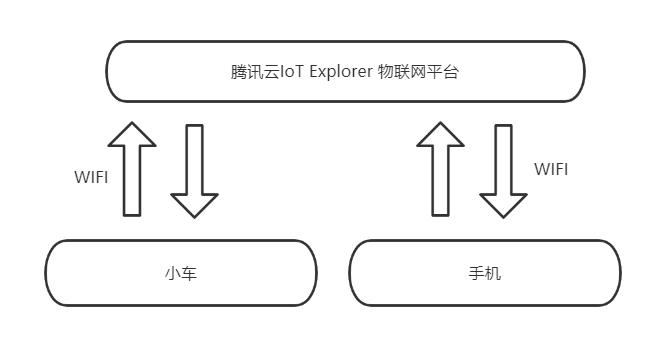
整体架构图
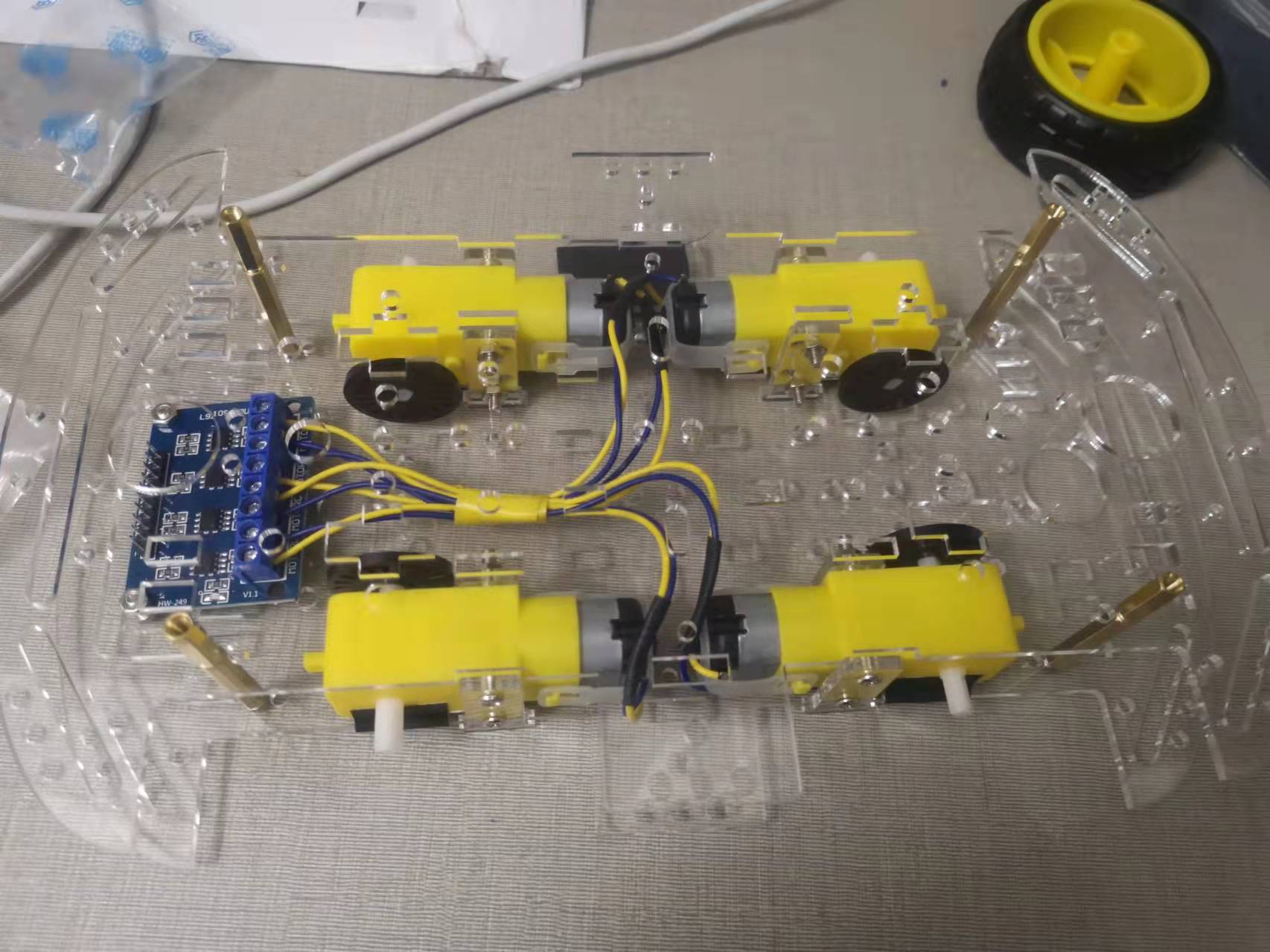
三,小车硬件组成。
1,小车底盘。四个直流电机驱动。
小车底盘
2,TencentOS Tiny AIoT开发套件
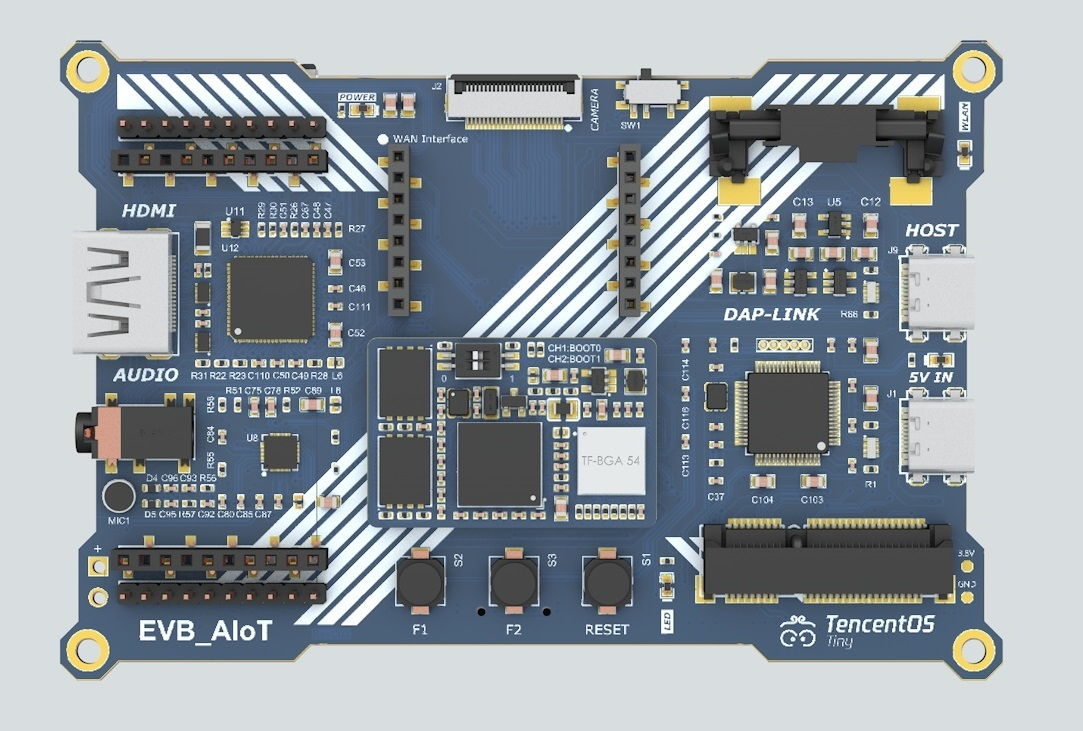
TencentOS Tiny AIoT开发板
开发板特性:
- 内置TencentOS Tiny开源物联网操作系统。
- 核心板采用的RT1062处理器属于i.MX RT 系列 MCU,是由 NXP 推出的跨界处理器,跨界是指该系列MCU的定位既非传统的微控制器、也非传统的微处理器,i.MX RT 系列 MCU 则综合了两者的优势,既具备高频率(最高主频600M)、高处理性能,也具备中断响应迅速、实时性高的特点。
- 1M RAM 16M SDRAM 64MB qspi flash 128MB spi flash。
- 板载Type-C接口CMSIS DAP仿真器。
- 板载PCIE接口,可扩展4G类物联网模组。
- 板载物联网俱乐部WAN Interface接口,可支持NB-IoT、WiFi、4G cat1、LoRa等模组。
- 板载物联网俱乐部E53 Interface接口,可扩展全系E53传感器。
- 板载标准24P DVP摄像头接口,可支持最高500万像素摄像头。
- 板载RGB显示接口,可转换HDMI输出。
- 板载高性能音频解码芯片,可做语音识别测试。
- 预留SD卡、用户按键、SPI Flash。
3,HG7881CP 四路直流电机驱动模块。
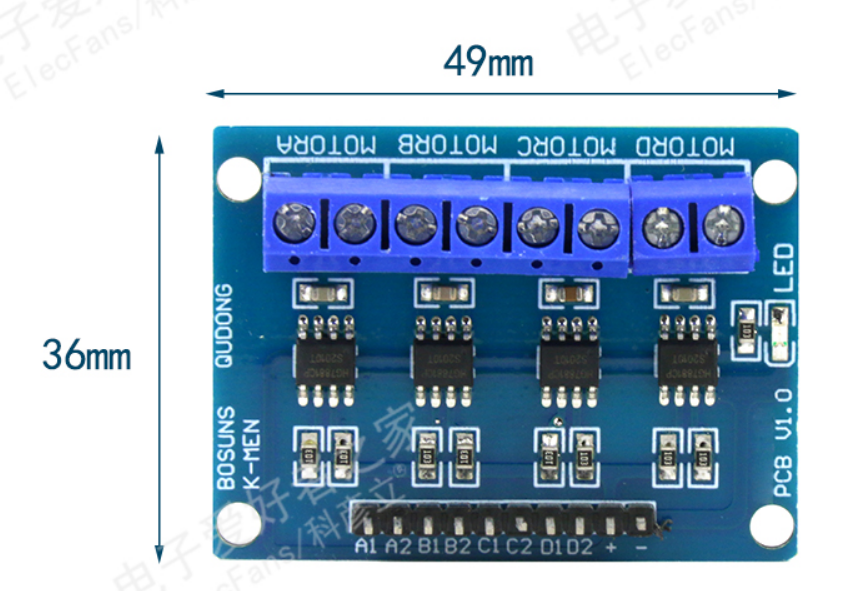
电机驱动模块

4,HC-SR04超声波测距模块。
HC-SR04

HC-SR04模块工作原理:
(1)采用IO触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.
测试距离=(高电平时间*声速(340M/S))/2;
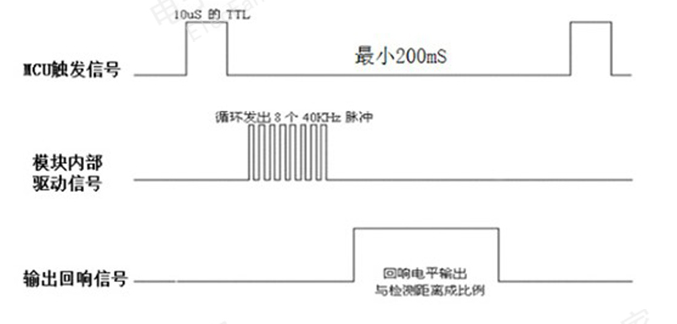
超声波时序图
5,ESP8266模组
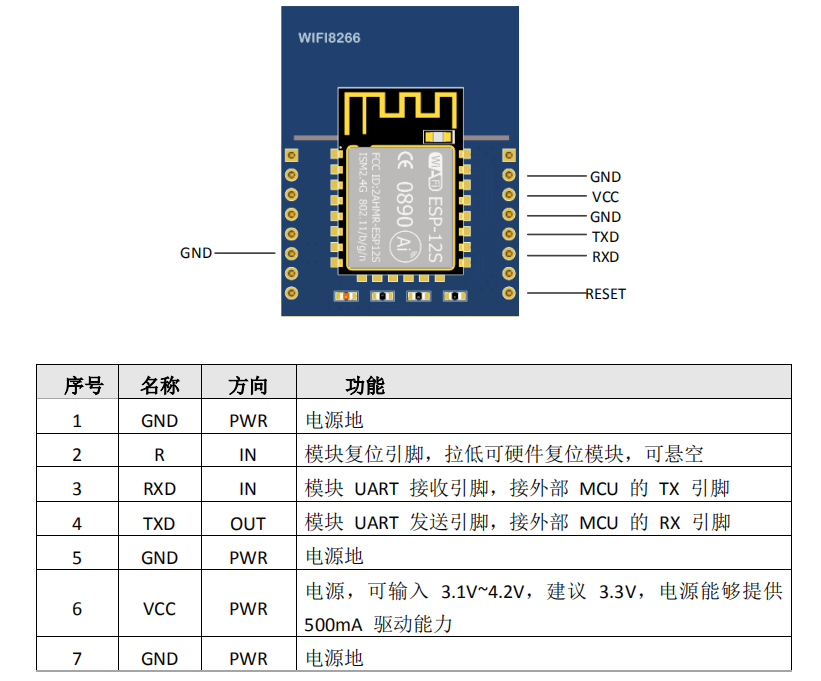
ESP8266模组
四,项目涉及到的知识点。
1,腾讯云平台的利用,H5面板配置及调试。
2,TencentOS Tiny的使用。
3,了解MQTT协议,了解cJSON数据格式。
4,利用ESP8266模块给腾讯云平台发送接收数据。
5,官方开发工具MCUXpresso IDE的使用。
6,RT1062的GPIO的配置。
7,RT1062利用输入捕获测量脉宽。
五,软件介绍。
1,TencentOS tiny物联网操作系统
TencentOS tiny是腾讯面向物联网领域开发的实时操作系统,现已捐赠给开放原子开源基金会进行孵化,具有低功耗,低资源占用,模块化,安全可靠等特点,可有效提升物联网终端产品开发效率。TencentOS tiny 提供精简的 RTOS 内核,内核组件可裁剪可配置,可快速移植到多种主流 MCU (如NXP Arm Cortex-M 全系列)及模组芯片上。而且,基于RTOS内核提供了丰富的物联网组件,内部集成主流物联网协议栈(如 CoAP/MQTT/TLS/DTLS/LoRaWAN/NB-IoT 等),可助力物联网终端设备及业务快速接入腾讯云物联网平台。
· 资源占用极少
TencentOS Tiny 内核具有超低资源占用的特点,RAM 0.8KB,ROM 1.8KB;在类似烟感和红外等实际场景下,TencentOS tiny 的资源占用仅为:RAM 2.69KB、ROM 12.38KB。
· 高效功耗管理框架
完整包含 MCU 和外围设备功耗管理,用户可以根据业务场景选择可参考的低功耗方案,有效降低设备耗电,延长设备寿命。
· 自动移植工具
TencentOS tiny 提供多种编译器快速移植指南和移植工具,可实现向新硬件开发板的一键移植,省时省力,有效提升开发效率。
· 最后一屏调试工具
TencentOS tiny 可以自动获取故障现场信息,并保持在端侧存储设备中,触发重启后会自动上传故障信息,可有效解决远程物联网设备故障信息获取难题,提升故障分析解决效率。
· 安全分级方案
TencentOS tiny 提供了多个等级的 IoT 安全方案。您可以根据业务场景和成本要求选择合适的安全解决方案,方便客户在安全需求和成本控制之间进行有效平衡。
2,云平台下发数据解析。
static void tos_topic_handler(void* client, message_data_t* msg)
{
(void) client;
cJSON* cjson_root = NULL;
cJSON* cjson_status = NULL;
cJSON* cjson_params = NULL;//add zyd
char* status = NULL;
// char* cmd_value = NULL; //add zyd
// char cmd_value = 0; //add zyd
k_event_flag_t event_flag = report_fail;
/* ��ӡ��־ */
MQTT_LOG_I("-----------------------------------------------------------------------------------");
MQTT_LOG_I("%s:%d %s()...\ntopic: %s, qos: %d. \nmessage:\n\t%s\n", __FILE__, __LINE__, __FUNCTION__,
msg->topic_name, msg->message->qos, (char*)msg->message->payload);
MQTT_LOG_I("-----------------------------------------------------------------------------------\n");
/* ʹ��cjson�����ϱ���Ӧ���� */
cjson_root = cJSON_Parse((char*)msg->message->payload);
if (cjson_root == NULL) {
printf("report reply message parser fail\r\n");
event_flag = report_fail;
goto exit;
}
/*解析 下发 指令 */
cjson_params = cJSON_GetObjectItem(cjson_root, "params");
if (cjson_params != NULL) {
cJSON* cjson_onoff = cJSON_GetObjectItem(cjson_params,"onoff");
if(cjson_onoff != NULL) car_cmd.onoff = cjson_onoff->valueint;
cJSON* cjson_drive = cJSON_GetObjectItem(cjson_params,"drive");
if(cjson_drive != NULL) car_cmd.drive = cjson_drive->valueint;
cJSON* cjson_reverse = cJSON_GetObjectItem(cjson_params,"reverse");
if(cjson_reverse != NULL) car_cmd.reverse = cjson_reverse->valueint;
cJSON* cjson_right = cJSON_GetObjectItem(cjson_params,"right");
if(cjson_right != NULL) car_cmd.right = cjson_right->valueint;
cJSON* cjson_left = cJSON_GetObjectItem(cjson_params,"left");
if(cjson_left != NULL) car_cmd.left = cjson_left->valueint;
}
/* ��ȡstatus״̬ */
cjson_status = cJSON_GetObjectItem(cjson_root, "status");
status = cJSON_GetStringValue(cjson_status);
if (cjson_status == NULL || status == NULL) {
printf("report reply status parser fail\r\n");
event_flag = report_fail;
goto exit;
}
/* �ж�status״̬ */
if (strstr(status,"success")) {
event_flag = report_success;
}else {
event_flag = report_fail;
}
exit:
cJSON_Delete(cjson_root);
cjson_root = NULL;
status = NULL;
tos_event_post(&report_result_event, event_flag);
return;
}复制
3,云平台上传数据。
void mqttclient_task(void)
{
int error;
int lightness = 0;
mqtt_client_t *client = NULL;
mqtt_message_t msg;
k_event_flag_t match_flag;
char host_ip[20];
memset(&msg, 0, sizeof(msg));
#ifdef USE_ESP8266
esp8266_sal_init(esp8266_port);
// esp8266_join_ap("TencentOS", "tencentostiny");
esp8266_join_ap("TP-LINK_AF26", "xn20190213");
// esp8266_join_ap("TP-LINK_EA9E", "20160130");
#endif
#ifdef USE_EC600S
ec600s_sal_init(HAL_UART_PORT_0);
#endif
mqtt_log_init();
client = mqtt_lease();
tos_event_create(&report_result_event, (k_event_flag_t)0u);
/* Domain Format: <your product ID>.iotcloud.tencentdevices.com */
tos_sal_module_parse_domain("O0CBVXMB0X.iotcloud.tencentdevices.com",host_ip,sizeof(host_ip));
/*
These infomation is generated by mqtt_config_gen.py tool in "TencentOS-tiny\tools" directory.
*/
mqtt_set_port(client, "1883");
mqtt_set_host(client, host_ip);
mqtt_set_client_id(client, "O0CBVXMB0XCar");
mqtt_set_user_name(client, "O0CBVXMB0XCar;21010406;12365;4294967295");
mqtt_set_password(client, "63d7adbf99fe8a2c93876da22dd150bdc6f78dea;hmacsha1");
mqtt_set_clean_session(client, 1);
error = mqtt_connect(client);
//MQTT_LOG_D("mqtt connect error is %#0x", error);
error = mqtt_subscribe(client, "$thing/down/property/O0CBVXMB0X/Car", QOS0, tos_topic_handler);
// MQTT_LOG_D("mqtt subscribe error is %#0x", error);
while (1) {
memset(&msg, 0, sizeof(msg));
// snprintf(report_buf, sizeof(report_buf), REPORT_DATA_TEMPLATE, lightness++);
snprintf(report_buf, sizeof(report_buf), REPORT_DATA_TEMPLATE, distance);
// if (lightness > 100) {
// lightness = 0;
// }
msg.qos = QOS0;
msg.payload = (void *) report_buf;
error = mqtt_publish(client, "$thing/up/property/O0CBVXMB0X/Car", &msg);
// MQTT_LOG_D("mqtt publish error is %#0x", error);
tos_event_pend(&report_result_event,
report_success|report_fail,
&match_flag,
TOS_TIME_FOREVER,
TOS_OPT_EVENT_PEND_ANY | TOS_OPT_EVENT_PEND_CLR);
if (match_flag == report_success) {
// printf("report to Tencent IoT Explorer success\r\n");
}else if (match_flag == report_fail){
// printf("report to Tencent IoT Explorer fail\r\n");
}
///
tos_task_delay(1000);
}
}复制
4,电机控制及超声波测距程序。(脉宽的测量程序这里参考野火i.MXRT1052开发板中例程)
#include "pin_mux.h"
#include "board.h"
#include "fsl_gpio.h"
#include "fsl_common.h"
#include "fsl_iomuxc.h"
#include "fsl_debug_console.h"
#include "clock_config.h"
#include "fsl_gpt.h"
#include "car_contrl.h"
#include "tos_k.h"
#include "pad_config.h"
#include "bsp_nvic.h"
//#define SR04_ECHO_GPIO GPIO1
//#define SR04_ECHO_GPIO_PIN 01U
#define SR04_TRIG_GPIO GPIO1
#define SR04_TRIG_GPIO_PIN 02U
/*******************************************************************************
* Variables
******************************************************************************/
/* Whether the SW is turned on */
volatile bool g_InputSignal = false;
/* Symbols to be used with GPIO driver */
#define MOTOR_D1_GPIO GPIO2 /*!< GPIO peripheral base pointer */
#define MOTOR_D1_GPIO_PIN 30U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_D2_GPIO GPIO2 /*!< GPIO peripheral base pointer */
#define MOTOR_D2_GPIO_PIN 31U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_B1_GPIO GPIO1 /*!< GPIO peripheral base pointer */
#define MOTOR_B1_GPIO_PIN 16U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_B2_GPIO GPIO1 /*!< GPIO peripheral base pointer */
#define MOTOR_B2_GPIO_PIN 17U /*!< GPIO pin number */
#define MOTOR_REVERSE_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 0U)
#define MOTOR_DRIVE_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 1U)
#define MOTOR_RIGHT_EN() GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 1U)
#define MOTOR_LEFT_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 1U)
#define MOTOR_STOP() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 0U);
#define SR04_TRIG_ON() GPIO_PinWrite(SR04_TRIG_GPIO, SR04_TRIG_GPIO_PIN, 1U);
#define SR04_TRIG_OFF() GPIO_PinWrite(SR04_TRIG_GPIO, SR04_TRIG_GPIO_PIN, 0U);
//*****************//
ctrl_cmd_t car_cmd;
volatile uint64_t timer = 0;
volatile int distance = 0;
int trig_cnt = 0;
// 定时器输入捕获用户自定义变量结构体定义
volatile GPT_ICUserValueTypeDef GPT_ICUserValueStructure = {0,0,0,0,0};
/**
* @brief 配置GPT相关引脚功能
* @param 无
* @retval 无
*/
void GPT_GPIO_Config(void)
{
/*定义GPIO引脚配置结构体*/
gpio_pin_config_t gpt_config;
IOMUXC_SetPinMux(IOMUXC_GPIO_EMC_40_GPT2_CAPTURE2, 0U);
IOMUXC_SetPinConfig(IOMUXC_GPIO_EMC_40_GPT2_CAPTURE2, GPT_COMPARE_PAD_CONFIG_DATA);
gpt_config.direction = kGPIO_DigitalInput; //输入模式
//gpt_config.outputLogic = 0; //默认高电平
gpt_config.interruptMode = kGPIO_NoIntmode; //不使用中断
/* 初始化 GPT COMPARE1 GPIO. */
GPIO_PinInit(GPT2_CAPTURE2_GPIO, GPT2_CAPTURE2_GPIO_PIN, &gpt_config);
}
/**
* @brief 配置GPT工作模式
* @param 无
* @retval 无
*/
void GPT_Config(void)
{
gpt_config_t gptConfig;
/*初始化GPT引脚*/
GPT_GPIO_Config();
/*GPT的时钟设置*/
CLOCK_SetMux(kCLOCK_PerclkMux, EXAMPLE_GPT_CLOCK_SOURCE_SELECT);
CLOCK_SetDiv(kCLOCK_PerclkDiv, EXAMPLE_GPT_CLOCK_DIVIDER_SELECT);
/*初始化GPT*/
GPT_GetDefaultConfig(&gptConfig);
GPT_Init(EXAMPLE_GPT, &gptConfig);
/* 设置时钟分频 */
GPT_SetClockDivider(EXAMPLE_GPT, GPT_DIVIDER);
/*设置位输入模式*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_RiseEdge);
/*使能输入捕获中断*/
GPT_EnableInterrupts(EXAMPLE_GPT, kGPT_InputCapture2InterruptEnable);
/*使能溢出中断*/
GPT_EnableInterrupts(EXAMPLE_GPT,kGPT_RollOverFlagInterruptEnable);
/*设置中断优先级,*/
set_IRQn_Priority(GPT_IRQ_ID,Group4_PreemptPriority_6, Group4_SubPriority_0);
/*使能中断*/
EnableIRQ(GPT_IRQ_ID);
/* 开启定时器 */
GPT_StartTimer(EXAMPLE_GPT);
}
/*定义中断服务函数*/
void EXAMPLE_GPT_IRQHandler(void)
{
//tos_knl_irq_enter();
//PRINTF("GPIO_GetPinsInterrupt_zyd3333\r\n");
/*
*当要被捕获的信号的周期大于定时器的最长定时时,定时器就会溢出,产生更新中断
*这个时候我们需要把这个最长的定时周期加到捕获信号的时间里面去
*/
if ( GPT_GetStatusFlags(EXAMPLE_GPT,kGPT_RollOverFlag) != false )
{
if ( GPT_ICUserValueStructure.Capture_StartFlag != 0 )
{
GPT_ICUserValueStructure.Capture_Period ++;
}
GPT_ClearStatusFlags(EXAMPLE_GPT, kGPT_RollOverFlag);
}
/*捕获中断*/
if (GPT_GetStatusFlags(EXAMPLE_GPT,kGPT_InputCapture2Flag) != false)
{
if(GPT_ICUserValueStructure.Capture_FinishFlag != 1)
{
/*第一次捕获*/
if ( GPT_ICUserValueStructure.Capture_StartFlag == 0 )
{
/*清除溢出次数*/
GPT_ICUserValueStructure.Capture_Period = 0;
/*读取当前计数值*/
GPT_ICUserValueStructure.Capture_CcrValue_1 = GPT_GetInputCaptureValue(EXAMPLE_GPT,kGPT_InputCapture_Channel2);
//PRINTF("GPIO_GetPinsInterrupt_zyd1111 RiseEdge %d \r\n",GPT_ICUserValueStructure.Capture_CcrValue_1);
/*当第一次捕获到上升沿之后,就把捕获边沿配置为上升沿*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_FallEdge);
/*开始捕获标志置1*/
GPT_ICUserValueStructure.Capture_StartFlag = 1;
}
/*上升沿捕获中断,第二次捕获*/
else
{
/*获取捕获比较寄存器的值,这个值就是捕获到的高电平的时间的值*/
GPT_ICUserValueStructure.Capture_CcrValue_2 = GPT_GetInputCaptureValue(EXAMPLE_GPT,kGPT_InputCapture_Channel2);
//PRINTF("GPIO_GetPinsInterrupt_zyd2222 FallEdge%d \r\n",GPT_ICUserValueStructure.Capture_CcrValue_2);
/*当第二次捕获到上升沿之后,就把捕获边沿配置为下降沿,好开启新的一轮捕获*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_RiseEdge);
/*开始捕获标志清0*/
GPT_ICUserValueStructure.Capture_StartFlag = 0;
/*捕获完成标志置1 */
GPT_ICUserValueStructure.Capture_FinishFlag = 1;
}
}
GPT_ClearStatusFlags(EXAMPLE_GPT, kGPT_InputCapture2Flag);
}
//tos_knl_irq_leave();
}
void delay(uint32_t count)
{
volatile uint32_t i = 0;
for (i = 0; i < count; ++i)
{
__asm("NOP");
}
}
void motor_ctrl_entry(void *arg)
{
/*初始化并开启GPT定时器*/
GPT_Config();
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
while (1) {
if (car_cmd.onoff){
USER_LED_ON();
}else{
USER_LED_OFF();
}
if ((car_cmd.drive)&&(distance>=300)){
MOTOR_DRIVE_EN();
}else if(car_cmd.reverse){
MOTOR_REVERSE_EN();
}else if(car_cmd.right){
MOTOR_RIGHT_EN();
}else if(car_cmd.left){
MOTOR_LEFT_EN();
}else{
MOTOR_STOP();
}
trig_cnt++;
if(GPT_ICUserValueStructure.Capture_FinishFlag)
{
/*得到计数值,timer 为64位数据,32位很可能会溢出*/
timer = GPT_ICUserValueStructure.Capture_Period * 0xffffffff;
timer += GPT_ICUserValueStructure.Capture_CcrValue_2;
timer -= GPT_ICUserValueStructure.Capture_CcrValue_1;
/*将计数值转化为时间,单位(ms)*/
//timer = timer / ((EXAMPLE_GPT_CLK_FREQ)/1000); //单位ms
timer = (172*timer) / ((EXAMPLE_GPT_CLK_FREQ)/1000);//单程声速 344/2 =172 距离单位mm
distance =(int)(timer);
//PRINTF("the result is: %lld ms \r\n",timer);
PRINTF("the result is: %lld ms \r\n",distance);
GPT_ICUserValueStructure.Capture_FinishFlag = 0;
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
trig_cnt = 0;
}
if(trig_cnt>10)
{
trig_cnt = 0;
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
}
//PRINTF("###I am task1 %d \r\n",GPT_ICUserValueStructure.Capture_Period);
tos_task_delay(20);
}
}复制
六,腾讯连连H5面板。
1,电脑端调试界面。
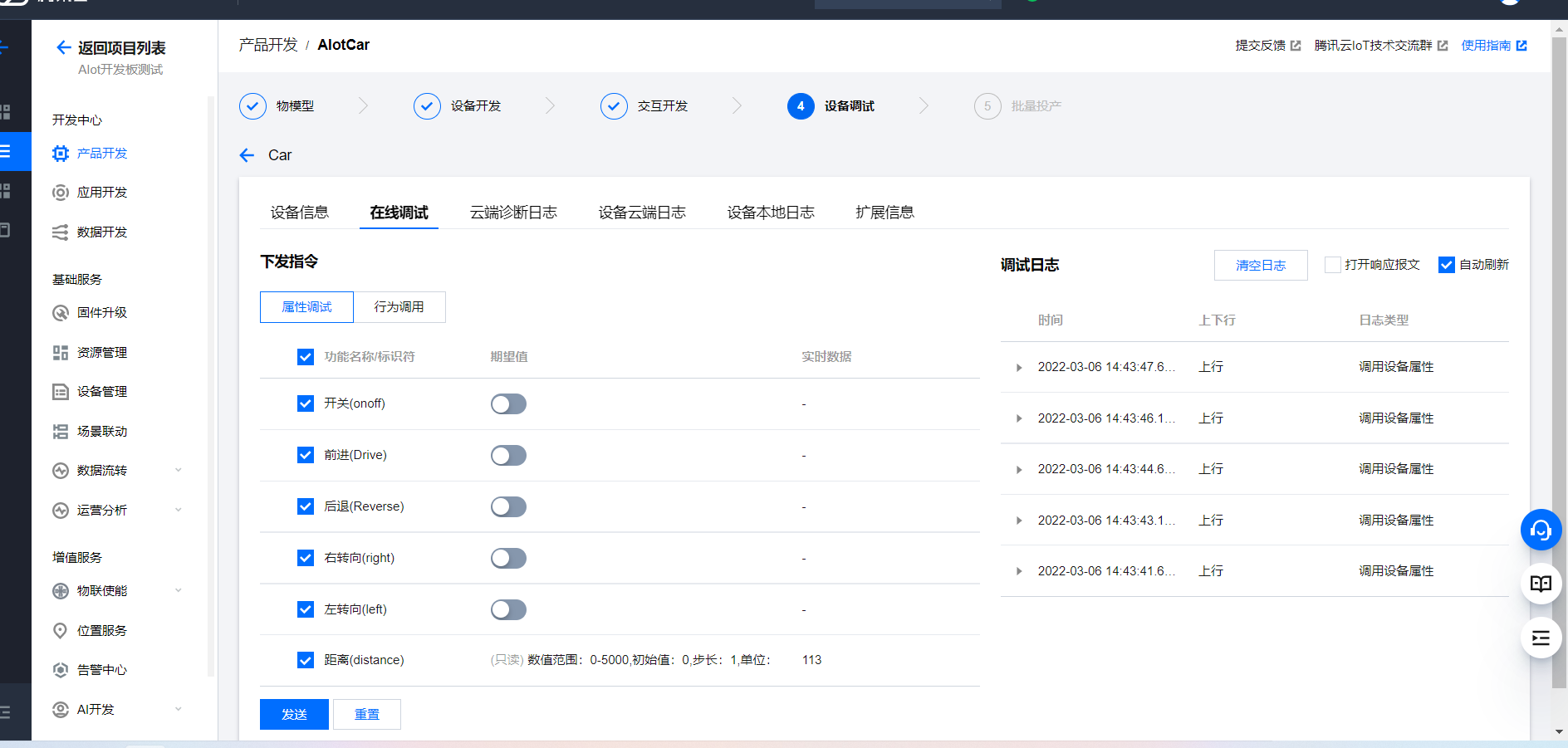
调试界面
2,手机端界面。
这里用的是标准面板,使用方法还是很简单的,不过界面和功能有待优化,有时间使用SDK开发,应该就会非常好了。

手机端
七,总结。
以前很少接触物联网方面的项目,随着物联网的普及应用,以后工作中可能会大量用到,通过这个项目,确实学到了很多知识,受益良多。自己按照教程,移植TencentOS Tiny 内核,仅仅几个步骤,非常简单。腾讯云IoT explorer平台初次使用,利用H5标准面板,上手非常快。工作中一直使用NXP的单片机,可以说非常有感情,如果能得到一块RT1062开发板,内心也是无限满足了,哈哈。
这次开发用的是NXP官方的开发工具MCUXpresso IDE ,用惯了keil,刚开始使用不太顺手,不过用习惯了,还是很好用的,功能非常强大。最重要的是keil是要版权的,官方能提供免费的IDE,真的该多多支持。
由于时间太紧,好多功能没来的及做,后面,有时间会继续完善,继续学习TencentOS Tiny和RT1062。
原创声明,本文系作者授权云+社区发表,未经许可,不得转载。
如有侵权,请联系 [email protected] 删除。
智能推荐
普里姆算法c语言(详细解读)_c语言普里姆算法-程序员宅基地
文章浏览阅读854次,点赞5次,收藏12次。找到与这个系统邻接的边(0,1),(5,4),比较两者的权值,容易发现权值最小的为25,因此加入边(5,4),同时加入结点4和边(5,4)。4.将0,5,4,3以及相关的边看成一个整体,与其邻接的边有(0,1)28,(4,6)24,(3,6)18,(3,2)12,四个边中权值最小的边是(3,2),所以加入结点2以及边(3,2)。5.与4中所构成的整体邻接的边有(0,1)28,(4,6)24,(3,6)18,(2,1)16,四者中权值最小的边为(2,1),所以加入结点1以及边(2,1)。_c语言普里姆算法
nohub 和 & 在linux上不间断后台运行程序-程序员宅基地
文章浏览阅读3.1k次,点赞2次,收藏15次。长时间在服务器上运行深度学习代码,使用nohub 命令行 & 可以让代码不间断在后台运行_nohub
Policy-based Reinforcement learning_policy函数-程序员宅基地
文章浏览阅读4k次,点赞18次,收藏69次。强化学习这一章会讲基于策略的强化学习Value-Based Reinforcement Learning-DQN强化学习前言一、policy函数二、DQN2.1 游戏中agent的目标是什么?2.2 agent如何做决策?2.3 如何理解Q* 函数呢?2.5 DQN打游戏?三、如何训练DQN?3.1 TD算法3.2 TD算法训练DQN四、训练步骤六、总结前言说明一下:这是我的一个学习笔记,课程链接如下:最易懂的强化学习课程公众号:AI那些事一、policy函数我们回顾一下Acti_policy函数
project2016调配资源冲突-程序员宅基地
文章浏览阅读5.4k次,点赞9次,收藏26次。(1) Project查看资源负荷情况的方法和结果在工时类资源会存在资源过度分配(在同一个时间段给工时类资源分配的资源超出了他的最大单位)的情况,而成本类、材料类资源则不会有、查看资源负荷的方法有:在视图栏------资源图表如下图在这里我们可以看到每个资源的分配状况,如下图滚动鼠标滑轮就会出现不同的资源分配状况此时选择“资源”—“下一个资源过度分配处”如下图总结:甘特图、..._project2016调配资源冲突
推荐算法知识图谱模型(二):KGCN-程序员宅基地
文章浏览阅读235次。常用的KGE方法侧重于建模严格的语义相关性(例如,TransE和TransR假设头+关系=尾),这更适合于KG补全和链接预测等图内应用,而不是推荐。更自然、更直观的方法是直接设计一个图算法来利用KG结构。_图谱模型
ajax跨域与cookie跨域_一级域名 的cookie ajax 请求二级域名时获取cookie-程序员宅基地
文章浏览阅读389次。ajax跨域ajax跨域取数据(利用可以跨域加载js的原理 functioncallback(){ }这是需要返回这样一个js函数)ajax数据类型使用jsonp :如 ajax{ url:..._一级域名 的cookie ajax 请求二级域名时获取cookie
随便推点
如何解决深度冲突(Z-fighting),画面闪烁的问题-程序员宅基地
文章浏览阅读3.6k次,点赞3次,收藏6次。参考:OpenGL教程:深度测试深度冲突一个很常见的视觉错误会在两个平面或者三角形非常紧密地平行排列在一起时会发生,深度缓冲没有足够的精度来决定两个形状哪个在前面。结果就是这两个形状不断地在切换前后顺序,这会导致很奇怪的花纹。这个现象叫做深度冲突(Z-fighting),因为它看起来像是这两个形状在争夺(Fight)谁该处于顶端。防止深度冲突第一个也是最重要的技巧是永远不要把多个物体摆得太靠近,以至于它们的一些三角形会重叠。通过在两个物体之间设置一个用户无法注意到的偏移值,你可以完全避免这两个物体之_深度冲突
Android 第三方库--2017年Android开源项目及库汇总_panel.travel-tv.top-程序员宅基地
文章浏览阅读1.1k次。转自:http://blog.csdn.net/jsonnan/article/details/62215287东西有点多,但是资源绝对nice,自己都全部亲身体验过了,大家可放心使用github排名:https://github.com/trending,github搜索:https://github.com/searchUIAwesome-MaterialDesign..._panel.travel-tv.top
adb链接模拟器_adbconnect连接模拟器-程序员宅基地
文章浏览阅读1.3k次。不同的模拟器的端口不一样,所以链接不同的模拟器有不同的链接方式不指定端口 默认adb 链接的是5555端口夜神模拟器adb connect 127.0.0.1:62001逍遥模拟器adb connect 127.0.0.1:21503mumu模拟器(网易的)adb connect 127.0.0.1:7555window电脑一般都会带有adb的命令,直接去命令行页面使用adb 链接..._adbconnect连接模拟器
Python绘图Matplotlib手册-程序员宅基地
文章浏览阅读516次。Python绘图Matplotlib手册_matplotlib手册
lego-loam阅读理解笔记 一_horizon_angle = atan2(p.x, p.y) * 180.0 / m_pi;-程序员宅基地
文章浏览阅读1.3k次。前言论文:https://ieeexplore.ieee.org/abstract/document/8594299ego-loam源码地址:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM文章原理讲解除了看论文,看看这些博客:LeGO-LOAM:轻量级地面优化的建图其他博客代码理解推荐:https://blog.csdn.net/orange_littlegirl/article/details/95238586安装编译..._horizon_angle = atan2(p.x, p.y) * 180.0 / m_pi;
购物车功能测试用例测试点整理思维导图方式_购物车测试点思维导图-程序员宅基地
文章浏览阅读8.2k次,点赞12次,收藏71次。_购物车测试点思维导图