python毕业设计 深度学习OCR中文识别 - opencv python_定位中文文字区域的模型-程序员宅基地
0 前言
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
**基于深度学习OCR中文识别系统 **
学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
选题指导,项目分享:
https://gitee.com/yaa-dc/warehouse-1/blob/master/python/README.md
1 课题背景
在日常生产生活中有大量的文档资料以图片、PDF的方式留存,随着时间推移 往往难以检索和归类 ,文字识别(Optical Character Recognition,OCR )是将图片、文档影像上的文字内容快速识别成为可编辑的文本的技术。
高性能文档OCR识别系统是基于深度学习技术,综合运用Tensorflow、CNN、Caffe 等多种深度学习训练框架,基于千万级大规模文字样本集训练完成的OCR引擎,与传统的模式识别的技术相比,深度学习技术支持更低质量的分辨率、抗干扰能力更强、适用的场景更复杂,文字的识别率更高。
本项目基于Tensorflow、keras/pytorch实现对自然场景的文字检测及OCR中文文字识别。
2 实现效果
公式检测
纯文字识别
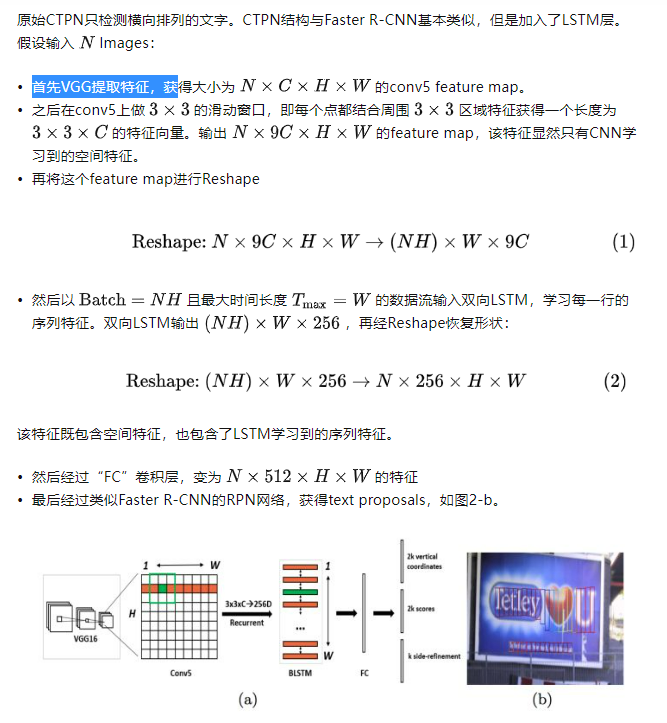
3 文本区域检测网络-CTPN
对于复杂场景的文字识别,首先要定位文字的位置,即文字检测。
简介
CTPN是在ECCV 2016提出的一种文字检测算法。CTPN结合CNN与LSTM深度网络,能有效的检测出复杂场景的横向分布的文字,效果如图1,是目前比较好的文字检测算法。由于CTPN是从Faster RCNN改进而来,本文默认读者熟悉CNN原理和Faster RCNN网络结构。

相关代码
def main(argv):
pycaffe_dir = os.path.dirname(__file__)
parser = argparse.ArgumentParser()
# Required arguments: input and output.
parser.add_argument(
"input_file",
help="Input txt/csv filename. If .txt, must be list of filenames.\
If .csv, must be comma-separated file with header\
'filename, xmin, ymin, xmax, ymax'"
)
parser.add_argument(
"output_file",
help="Output h5/csv filename. Format depends on extension."
)
# Optional arguments.
parser.add_argument(
"--model_def",
default=os.path.join(pycaffe_dir,
"../models/bvlc_reference_caffenet/deploy.prototxt.prototxt"),
help="Model definition file."
)
parser.add_argument(
"--pretrained_model",
default=os.path.join(pycaffe_dir,
"../models/bvlc_reference_caffenet/bvlc_reference_caffenet.caffemodel"),
help="Trained model weights file."
)
parser.add_argument(
"--crop_mode",
default="selective_search",
choices=CROP_MODES,
help="How to generate windows for detection."
)
parser.add_argument(
"--gpu",
action='store_true',
help="Switch for gpu computation."
)
parser.add_argument(
"--mean_file",
default=os.path.join(pycaffe_dir,
'caffe/imagenet/ilsvrc_2012_mean.npy'),
help="Data set image mean of H x W x K dimensions (numpy array). " +
"Set to '' for no mean subtraction."
)
parser.add_argument(
"--input_scale",
type=float,
help="Multiply input features by this scale to finish preprocessing."
)
parser.add_argument(
"--raw_scale",
type=float,
default=255.0,
help="Multiply raw input by this scale before preprocessing."
)
parser.add_argument(
"--channel_swap",
default='2,1,0',
help="Order to permute input channels. The default converts " +
"RGB -> BGR since BGR is the Caffe default by way of OpenCV."
)
parser.add_argument(
"--context_pad",
type=int,
default='16',
help="Amount of surrounding context to collect in input window."
)
args = parser.parse_args()
mean, channel_swap = None, None
if args.mean_file:
mean = np.load(args.mean_file)
if mean.shape[1:] != (1, 1):
mean = mean.mean(1).mean(1)
if args.channel_swap:
channel_swap = [int(s) for s in args.channel_swap.split(',')]
if args.gpu:
caffe.set_mode_gpu()
print("GPU mode")
else:
caffe.set_mode_cpu()
print("CPU mode")
# Make detector.
detector = caffe.Detector(args.model_def, args.pretrained_model, mean=mean,
input_scale=args.input_scale, raw_scale=args.raw_scale,
channel_swap=channel_swap,
context_pad=args.context_pad)
# Load input.
t = time.time()
print("Loading input...")
if args.input_file.lower().endswith('txt'):
with open(args.input_file) as f:
inputs = [_.strip() for _ in f.readlines()]
elif args.input_file.lower().endswith('csv'):
inputs = pd.read_csv(args.input_file, sep=',', dtype={
'filename': str})
inputs.set_index('filename', inplace=True)
else:
raise Exception("Unknown input file type: not in txt or csv.")
# Detect.
if args.crop_mode == 'list':
# Unpack sequence of (image filename, windows).
images_windows = [
(ix, inputs.iloc[np.where(inputs.index == ix)][COORD_COLS].values)
for ix in inputs.index.unique()
]
detections = detector.detect_windows(images_windows)
else:
detections = detector.detect_selective_search(inputs)
print("Processed {} windows in {:.3f} s.".format(len(detections),
time.time() - t))
# Collect into dataframe with labeled fields.
df = pd.DataFrame(detections)
df.set_index('filename', inplace=True)
df[COORD_COLS] = pd.DataFrame(
data=np.vstack(df['window']), index=df.index, columns=COORD_COLS)
del(df['window'])
# Save results.
t = time.time()
if args.output_file.lower().endswith('csv'):
# csv
# Enumerate the class probabilities.
class_cols = ['class{}'.format(x) for x in range(NUM_OUTPUT)]
df[class_cols] = pd.DataFrame(
data=np.vstack(df['feat']), index=df.index, columns=class_cols)
df.to_csv(args.output_file, cols=COORD_COLS + class_cols)
else:
# h5
df.to_hdf(args.output_file, 'df', mode='w')
print("Saved to {} in {:.3f} s.".format(args.output_file,
time.time() - t))
CTPN网络结构
4 文本识别网络-CRNN
CRNN 介绍
CRNN 全称为 Convolutional Recurrent Neural Network,主要用于端到端地对不定长的文本序列进行识别,不用先对单个文字进行切割,而是将文本识别转化为时序依赖的序列学习问题,就是基于图像的序列识别。
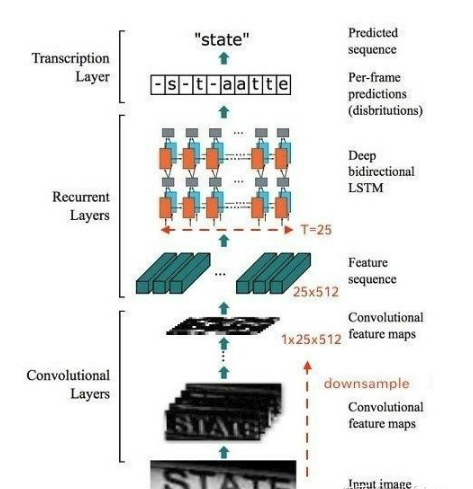
整个CRNN网络结构包含三部分,从下到上依次为:
- CNN(卷积层),使用深度CNN,对输入图像提取特征,得到特征图;
- RNN(循环层),使用双向RNN(BLSTM)对特征序列进行预测,对序列中的每个特征向量进行学习,并输出预测标签(真实值)分布;
- CTC loss(转录层),使用 CTC 损失,把从循环层获取的一系列标签分布转换成最终的标签序列。
CNN
卷积层的结构图:
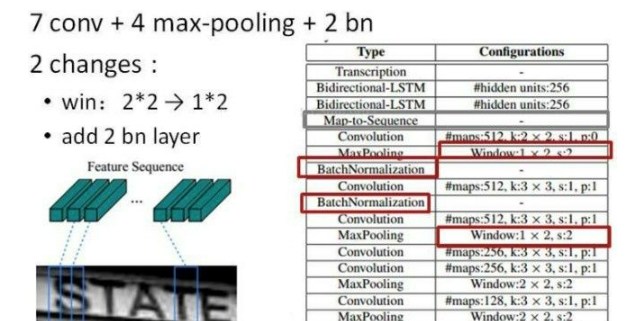
这里有一个很精彩的改动,一共有四个最大池化层,但是最后两个池化层的窗口尺寸由 2x2 改为 1x2,也就是图片的高度减半了四次(除以 2^4 ),而宽度则只减半了两次(除以2^2),这是因为文本图像多数都是高较小而宽较长,所以其feature map也是这种高小宽长的矩形形状,如果使用1×2的池化窗口可以尽量保证不丢失在宽度方向的信息,更适合英文字母识别(比如区分i和l)。
CRNN 还引入了BatchNormalization模块,加速模型收敛,缩短训练过程。
输入图像为灰度图像(单通道);高度为32,这是固定的,图片通过 CNN 后,高度就变为1,这点很重要;宽度为160,宽度也可以为其他的值,但需要统一,所以输入CNN的数据尺寸为 (channel, height, width)=(1, 32, 160)。
CNN的输出尺寸为 (512, 1, 40)。即 CNN 最后得到512个特征图,每个特征图的高度为1,宽度为40。
Map-to-Sequence
我们是不能直接把 CNN 得到的特征图送入 RNN 进行训练的,需要进行一些调整,根据特征图提取 RNN 需要的特征向量序列。
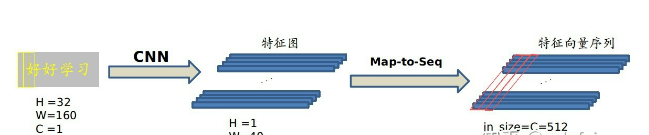
现在需要从 CNN 模型产生的特征图中提取特征向量序列,每一个特征向量(如上图中的一个红色框)在特征图上按列从左到右生成,每一列包含512维特征,这意味着第 i 个特征向量是所有的特征图第 i 列像素的连接,这些特征向量就构成一个序列。
由于卷积层,最大池化层和激活函数在局部区域上执行,因此它们是平移不变的。因此,特征图的每列(即一个特征向量)对应于原始图像的一个矩形区域(称为感受野),并且这些矩形区域与特征图上从左到右的相应列具有相同的顺序。特征序列中的每个向量关联一个感受野。
如下图所示:

这些特征向量序列就作为循环层的输入,每个特征向量作为 RNN 在一个时间步(time step)的输入。
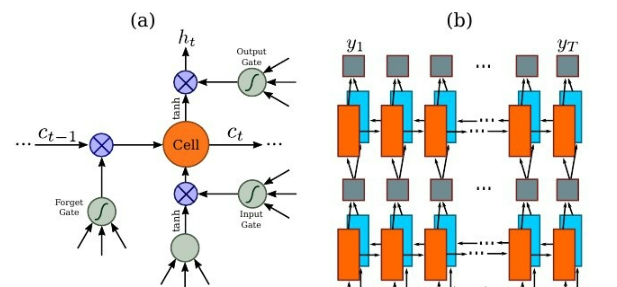
RNN
因为 RNN 有梯度消失的问题,不能获取更多上下文信息,所以 CRNN 中使用的是 LSTM,LSTM 的特殊设计允许它捕获长距离依赖,不了解的话可以看一下这篇文章 对RNN和LSTM的理解。
LSTM 是单向的,它只使用过去的信息。然而,在基于图像的序列中,两个方向的上下文是相互有用且互补的。将两个LSTM,一个向前和一个向后组合到一个双向LSTM中。此外,可以堆叠多层双向LSTM,深层结构允许比浅层抽象更高层次的抽象。
这里采用的是两层各256单元的双向 LSTM 网络:
通过上面一步,我们得到了40个特征向量,每个特征向量长度为512,在 LSTM 中一个时间步就传入一个特征向量进行分类,这里一共有40个时间步。
我们知道一个特征向量就相当于原图中的一个小矩形区域,RNN 的目标就是预测这个矩形区域为哪个字符,即根据输入的特征向量,进行预测,得到所有字符的softmax概率分布,这是一个长度为字符类别数的向量,作为CTC层的输入。
因为每个时间步都会有一个输入特征向量 x^T ,输出一个所有字符的概率分布 y^T ,所以输出为 40 个长度为字符类别数的向量构成的后验概率矩阵。
如下图所示:

然后将这个后验概率矩阵传入转录层。
CTC loss
这算是 CRNN 最难的地方,这一层为转录层,转录是将 RNN 对每个特征向量所做的预测转换成标签序列的过程。数学上,转录是根据每帧预测找到具有最高概率组合的标签序列。
端到端OCR识别的难点在于怎么处理不定长序列对齐的问题!OCR可建模为时序依赖的文本图像问题,然后使用CTC(Connectionist Temporal Classification, CTC)的损失函数来对 CNN 和 RNN 进行端到端的联合训练。
相关代码
def inference(self, inputdata, name, reuse=False):
"""
Main routine to construct the network
:param inputdata:
:param name:
:param reuse:
:return:
"""
with tf.variable_scope(name_or_scope=name, reuse=reuse):
# centerlized data
inputdata = tf.divide(inputdata, 255.0)
#1.特征提取阶段
# first apply the cnn feature extraction stage
cnn_out = self._feature_sequence_extraction(
inputdata=inputdata, name='feature_extraction_module'
)
#2.第二步, batch*1*25*512 变成 batch * 25 * 512
# second apply the map to sequence stage
sequence = self._map_to_sequence(
inputdata=cnn_out, name='map_to_sequence_module'
)
#第三步,应用序列标签阶段
# third apply the sequence label stage
# net_out width, batch, n_classes
# raw_pred width, batch, 1
net_out, raw_pred = self._sequence_label(
inputdata=sequence, name='sequence_rnn_module'
)
return net_out
选题指导,项目分享:
https://gitee.com/yaa-dc/warehouse-1/blob/master/python/README.md
智能推荐
艾美捷Epigentek DNA样品的超声能量处理方案-程序员宅基地
文章浏览阅读15次。空化气泡的大小和相应的空化能量可以通过调整完全标度的振幅水平来操纵和数字控制。通过强调超声技术中的更高通量处理和防止样品污染,Epigentek EpiSonic超声仪可以轻松集成到现有的实验室工作流程中,并且特别适合与表观遗传学和下一代应用的兼容性。Epigentek的EpiSonic已成为一种有效的剪切设备,用于在染色质免疫沉淀技术中制备染色质样品,以及用于下一代测序平台的DNA文库制备。该装置的经济性及其多重样品的能力使其成为每个实验室拥有的经济高效的工具,而不仅仅是核心设施。
11、合宙Air模块Luat开发:通过http协议获取天气信息_合宙获取天气-程序员宅基地
文章浏览阅读4.2k次,点赞3次,收藏14次。目录点击这里查看所有博文 本系列博客,理论上适用于合宙的Air202、Air268、Air720x、Air720S以及最近发布的Air720U(我还没拿到样机,应该也能支持)。 先不管支不支持,如果你用的是合宙的模块,那都不妨一试,也许会有意外收获。 我使用的是Air720SL模块,如果在其他模块上不能用,那就是底层core固件暂时还没有支持,这里的代码是没有问题的。例程仅供参考!..._合宙获取天气
EasyMesh和802.11s对比-程序员宅基地
文章浏览阅读7.7k次,点赞2次,收藏41次。1 关于meshMesh的意思是网状物,以前读书的时候,在自动化领域有传感器自组网,zigbee、蓝牙等无线方式实现各个网络节点消息通信,通过各种算法,保证整个网络中所有节点信息能经过多跳最终传递到目的地,用于数据采集。十多年过去了,在无线路由器领域又把这个mesh概念翻炒了一下,各大品牌都推出了mesh路由器,大多数是3个为一组,实现在面积较大的住宅里,增强wifi覆盖范围,智能在多热点之间切换,提升上网体验。因为节点基本上在3个以内,所以mesh的算法不必太复杂,组网形式比较简单。各厂家都自定义了组_802.11s
线程的几种状态_线程状态-程序员宅基地
文章浏览阅读5.2k次,点赞8次,收藏21次。线程的几种状态_线程状态
stack的常见用法详解_stack函数用法-程序员宅基地
文章浏览阅读4.2w次,点赞124次,收藏688次。stack翻译为栈,是STL中实现的一个后进先出的容器。要使用 stack,应先添加头文件include<stack>,并在头文件下面加上“ using namespacestd;"1. stack的定义其定义的写法和其他STL容器相同, typename可以任意基本数据类型或容器:stack<typename> name;2. stack容器内元素的访问..._stack函数用法
2018.11.16javascript课上随笔(DOM)-程序员宅基地
文章浏览阅读71次。<li> <a href = "“#”>-</a></li><li>子节点:文本节点(回车),元素节点,文本节点。不同节点树: 节点(各种类型节点)childNodes:返回子节点的所有子节点的集合,包含任何类型、元素节点(元素类型节点):child。node.getAttribute(at...
随便推点
layui.extend的一点知识 第三方模块base 路径_layui extend-程序员宅基地
文章浏览阅读3.4k次。//config的设置是全局的layui.config({ base: '/res/js/' //假设这是你存放拓展模块的根目录}).extend({ //设定模块别名 mymod: 'mymod' //如果 mymod.js 是在根目录,也可以不用设定别名 ,mod1: 'admin/mod1' //相对于上述 base 目录的子目录}); //你也可以忽略 base 设定的根目录,直接在 extend 指定路径(主要:该功能为 layui 2.2.0 新增)layui.exten_layui extend
5G云计算:5G网络的分层思想_5g分层结构-程序员宅基地
文章浏览阅读3.2k次,点赞6次,收藏13次。分层思想分层思想分层思想-1分层思想-2分层思想-2OSI七层参考模型物理层和数据链路层物理层数据链路层网络层传输层会话层表示层应用层OSI七层模型的分层结构TCP/IP协议族的组成数据封装过程数据解封装过程PDU设备与层的对应关系各层通信分层思想分层思想-1在现实生活种,我们在喝牛奶时,未必了解他的生产过程,我们所接触的或许只是从超时购买牛奶。分层思想-2平时我们在网络时也未必知道数据的传输过程我们的所考虑的就是可以传就可以,不用管他时怎么传输的分层思想-2将复杂的流程分解为几个功能_5g分层结构
基于二值化图像转GCode的单向扫描实现-程序员宅基地
文章浏览阅读191次。在激光雕刻中,单向扫描(Unidirectional Scanning)是一种雕刻技术,其中激光头只在一个方向上移动,而不是来回移动。这种移动方式主要应用于通过激光逐行扫描图像表面的过程。具体而言,单向扫描的过程通常包括以下步骤:横向移动(X轴): 激光头沿X轴方向移动到图像的一侧。纵向移动(Y轴): 激光头沿Y轴方向开始逐行移动,刻蚀图像表面。这一过程是单向的,即在每一行上激光头只在一个方向上移动。返回横向移动: 一旦一行完成,激光头返回到图像的一侧,准备进行下一行的刻蚀。
算法随笔:强连通分量-程序员宅基地
文章浏览阅读577次。强连通:在有向图G中,如果两个点u和v是互相可达的,即从u出发可以到达v,从v出发也可以到达u,则成u和v是强连通的。强连通分量:如果一个有向图G不是强连通图,那么可以把它分成躲个子图,其中每个子图的内部是强连通的,而且这些子图已经扩展到最大,不能与子图外的任一点强连通,成这样的一个“极大连通”子图是G的一个强连通分量(SCC)。强连通分量的一些性质:(1)一个点必须有出度和入度,才会与其他点强连通。(2)把一个SCC从图中挖掉,不影响其他点的强连通性。_强连通分量
Django(2)|templates模板+静态资源目录static_django templates-程序员宅基地
文章浏览阅读3.9k次,点赞5次,收藏18次。在做web开发,要给用户提供一个页面,页面包括静态页面+数据,两者结合起来就是完整的可视化的页面,django的模板系统支持这种功能,首先需要写一个静态页面,然后通过python的模板语法将数据渲染上去。1.创建一个templates目录2.配置。_django templates
linux下的GPU测试软件,Ubuntu等Linux系统显卡性能测试软件 Unigine 3D-程序员宅基地
文章浏览阅读1.7k次。Ubuntu等Linux系统显卡性能测试软件 Unigine 3DUbuntu Intel显卡驱动安装,请参考:ATI和NVIDIA显卡请在软件和更新中的附加驱动中安装。 这里推荐: 运行后,F9就可评分,已测试显卡有K2000 2GB 900+分,GT330m 1GB 340+ 分,GT620 1GB 340+ 分,四代i5核显340+ 分,还有写博客的小盒子100+ 分。relaybot@re...