ROS 教程之 vision: 摄像头标定camera calibration_ros教程之vision:攝像頭標定-程序员宅基地
技术标签: 用ROS开发自己的机器人
在上一个ROS教程视觉文章中,我们使用usb_cam包读入并发布了图像消息,但是图像没有被标定,因此存在畸变。ROS官方提供了用于单目或者双目标定的camera_calibration包。这个包是使用opencv里的张正友标定法,所以如果你有使用opencv标定的经验,可以直接标定,而不使用官方的程序。
官方也给出了单目的标定教程和双目视觉的标定教程。本教程基于usb_cam package 读取图像,然后使用官方例程进行标定。
1.使用usb_cam 读取图像,launch文件如下:
<launch>
<arg name="device" default="/dev/video0" />
<node name="usb_cam_node" pkg="usb_cam" type="usb_cam_node" output="screen">
<param name="video_device" value="$(arg device)" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="framerate" value="30" />
<param name="brightness" value="128" />
<param name="contrast" value="128" />
<param name="saturation " value="70" />
</node>
</launch>2.检查usb_cam package发布的消息:
$ rostopic list-
/usb_cam_node/camera_info /usb_cam_node/image_raw
$ rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.03 image:=/usb_cam_node/image_raw camera:=/usb_cam_node其中参数size 11x8 注意是字母x,他是棋盘内部角点个数,如下图所示。square为棋盘正方形边长,注意刚刚开始标定的时候,CALIBRATE按钮是灰色的。
4.标定程序使用方法:
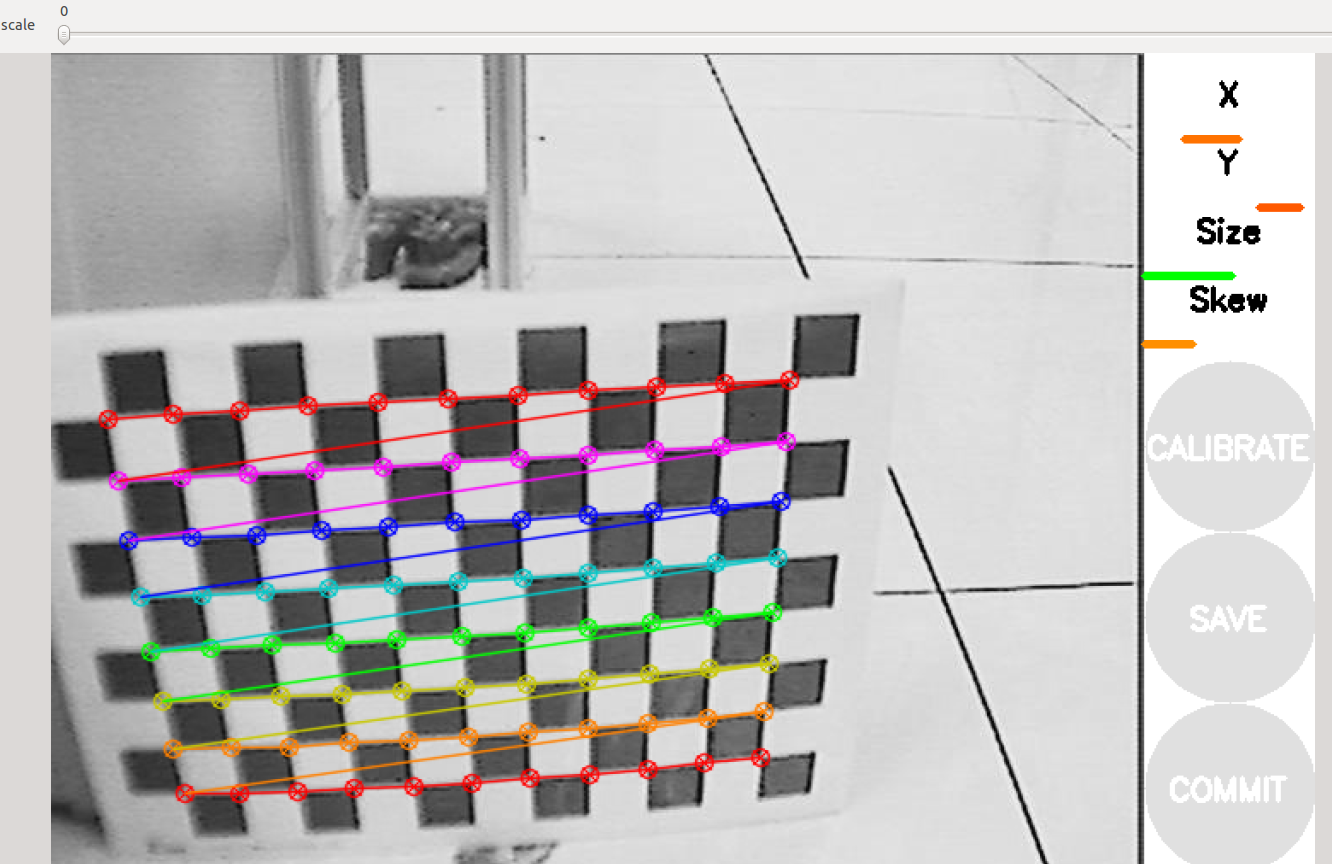
为了得到一个好的标定结果,应该使得标定板尽量出现在摄像头视野的各个位置里:
如标定板出现在视野中的左边,右边,上边和下边,标定板既有倾斜的,也有水平的,。
界面中的x:表示标定板在视野中的左右位置。
y:表示标定板在视野中的上下位置。
size:标定板在占视野的尺寸大小,也可以理解为标定板离摄像头的远近。
skew:标定板在视野中的倾斜位置。

并还要有棋盘占住大部分视野的图片,如下图所示:
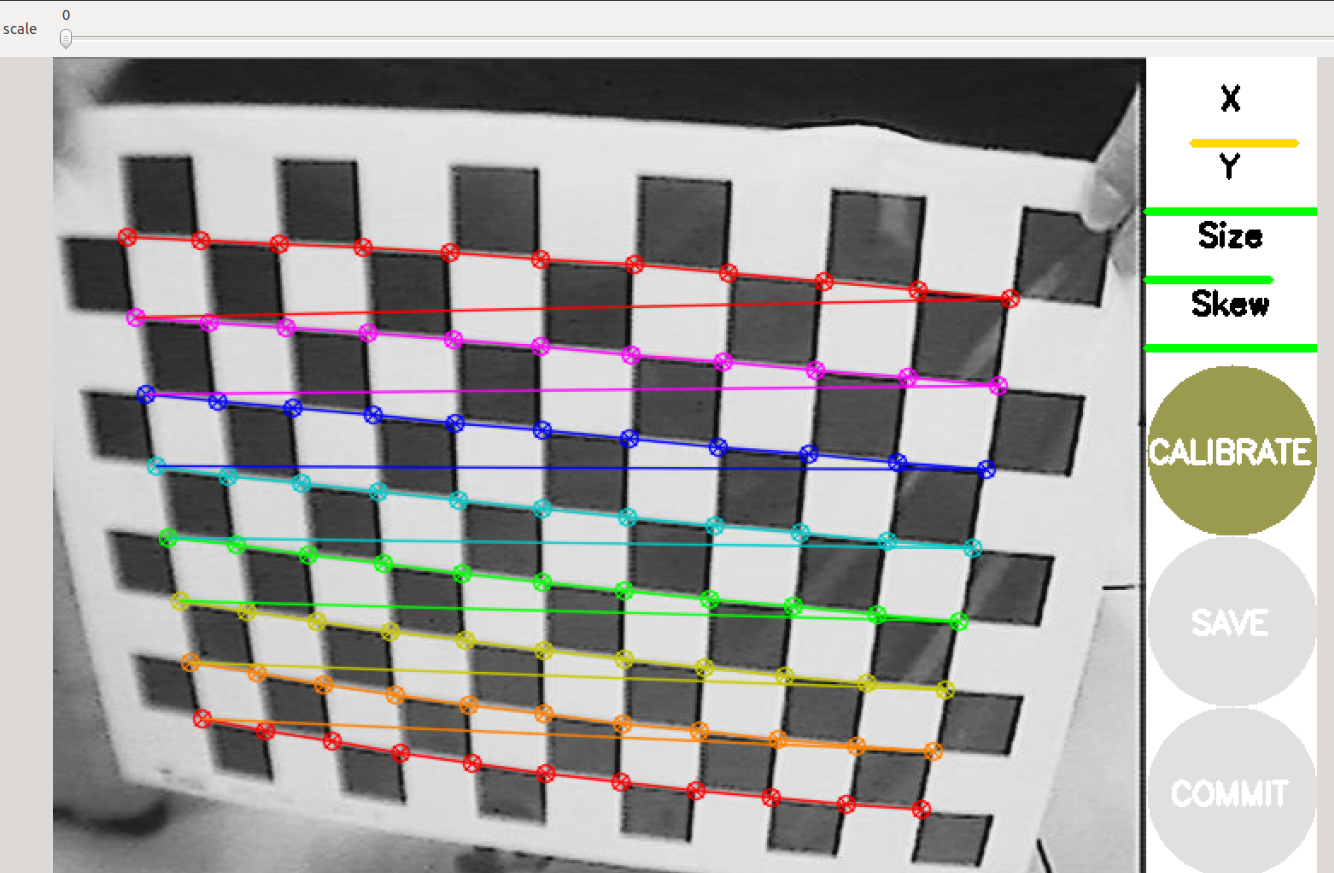
按着上述方式不断移动标定板,直到CALIBRATE按钮变亮,点击该按钮就会进行标定。标定过程将持续一两分钟,并且标定界面会变成灰色,无法进行操作,耐心等待即可。
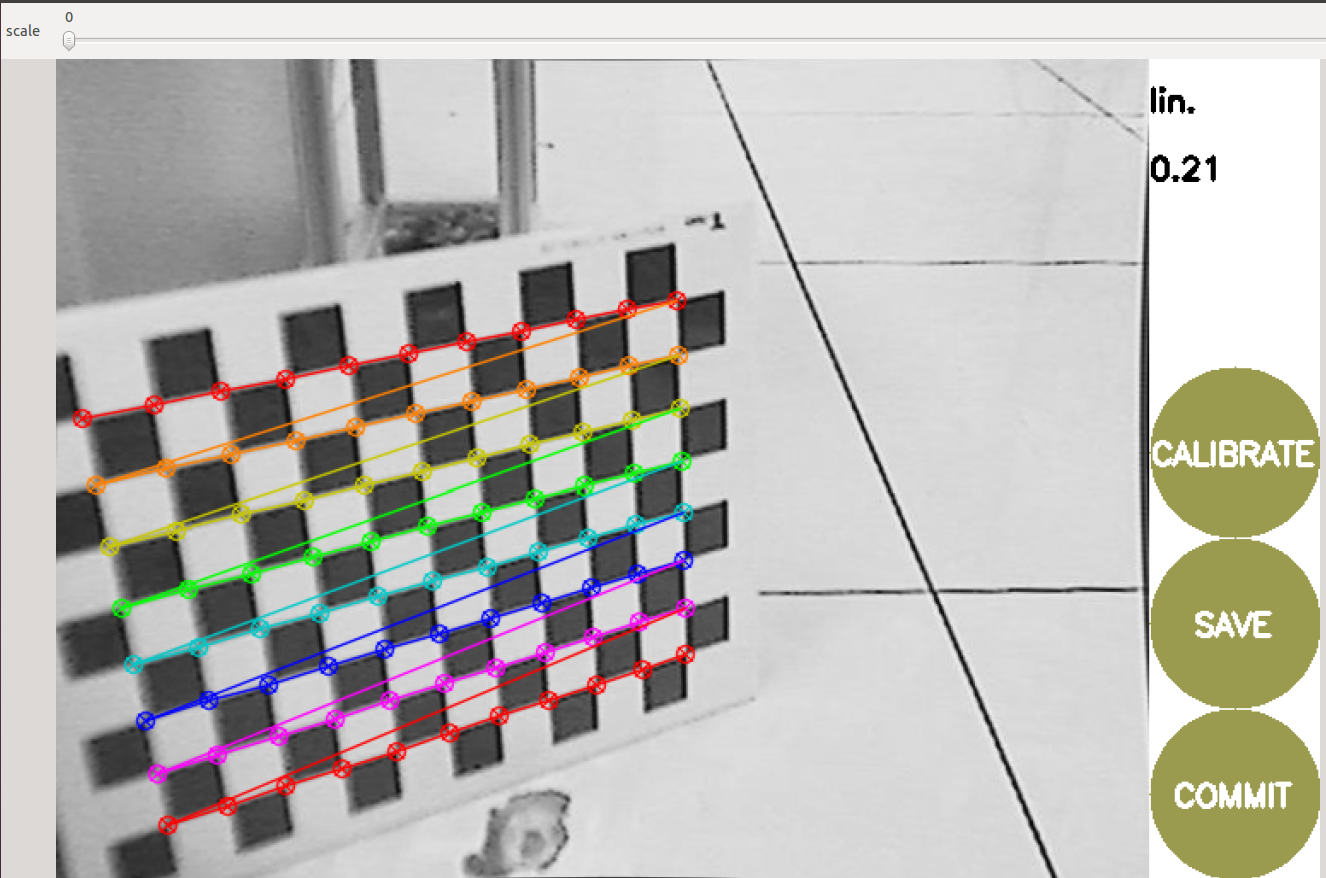
标定完成以后,你将看到如下图所示的窗口,窗口中的图像为标定后的结果,纠正了畸变。
并且,摄像机的各个参数会出现在标定程序的终端窗口中,如下:
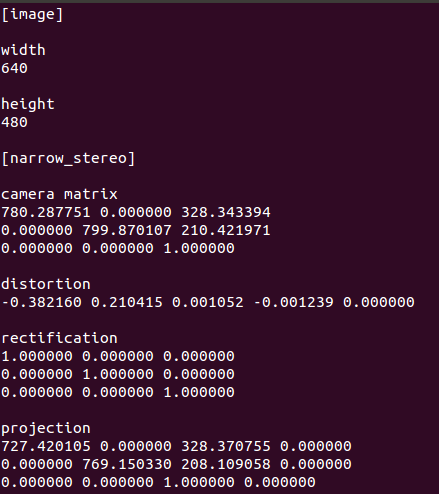
如果对标定结果满意,点击COMMIT按钮将结果保存到默认文件夹,在usb_cam窗口中可以看到如下信息,说明标定结果已经保存在相应文件夹下下次启动usb_cam节点时,会自动调用。

(转载请注明作者和出处:http://blog.csdn.net/heyijia0327 未经允许请勿用于商业用途)
reference:
智能推荐
while循环&CPU占用率高问题深入分析与解决方案_main函数使用while(1)循环cpu占用99-程序员宅基地
文章浏览阅读3.8k次,点赞9次,收藏28次。直接上一个工作中碰到的问题,另外一个系统开启多线程调用我这边的接口,然后我这边会开启多线程批量查询第三方接口并且返回给调用方。使用的是两三年前别人遗留下来的方法,放到线上后发现确实是可以正常取到结果,但是一旦调用,CPU占用就直接100%(部署环境是win server服务器)。因此查看了下相关的老代码并使用JProfiler查看发现是在某个while循环的时候有问题。具体项目代码就不贴了,类似于下面这段代码。while(flag) {//your code;}这里的flag._main函数使用while(1)循环cpu占用99
【无标题】jetbrains idea shift f6不生效_idea shift +f6快捷键不生效-程序员宅基地
文章浏览阅读347次。idea shift f6 快捷键无效_idea shift +f6快捷键不生效
node.js学习笔记之Node中的核心模块_node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是-程序员宅基地
文章浏览阅读135次。Ecmacript 中没有DOM 和 BOM核心模块Node为JavaScript提供了很多服务器级别,这些API绝大多数都被包装到了一个具名和核心模块中了,例如文件操作的 fs 核心模块 ,http服务构建的http 模块 path 路径操作模块 os 操作系统信息模块// 用来获取机器信息的var os = require('os')// 用来操作路径的var path = require('path')// 获取当前机器的 CPU 信息console.log(os.cpus._node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是
数学建模【SPSS 下载-安装、方差分析与回归分析的SPSS实现(软件概述、方差分析、回归分析)】_化工数学模型数据回归软件-程序员宅基地
文章浏览阅读10w+次,点赞435次,收藏3.4k次。SPSS 22 下载安装过程7.6 方差分析与回归分析的SPSS实现7.6.1 SPSS软件概述1 SPSS版本与安装2 SPSS界面3 SPSS特点4 SPSS数据7.6.2 SPSS与方差分析1 单因素方差分析2 双因素方差分析7.6.3 SPSS与回归分析SPSS回归分析过程牙膏价格问题的回归分析_化工数学模型数据回归软件
利用hutool实现邮件发送功能_hutool发送邮件-程序员宅基地
文章浏览阅读7.5k次。如何利用hutool工具包实现邮件发送功能呢?1、首先引入hutool依赖<dependency> <groupId>cn.hutool</groupId> <artifactId>hutool-all</artifactId> <version>5.7.19</version></dependency>2、编写邮件发送工具类package com.pc.c..._hutool发送邮件
docker安装elasticsearch,elasticsearch-head,kibana,ik分词器_docker安装kibana连接elasticsearch并且elasticsearch有密码-程序员宅基地
文章浏览阅读867次,点赞2次,收藏2次。docker安装elasticsearch,elasticsearch-head,kibana,ik分词器安装方式基本有两种,一种是pull的方式,一种是Dockerfile的方式,由于pull的方式pull下来后还需配置许多东西且不便于复用,个人比较喜欢使用Dockerfile的方式所有docker支持的镜像基本都在https://hub.docker.com/docker的官网上能找到合..._docker安装kibana连接elasticsearch并且elasticsearch有密码
随便推点
Python 攻克移动开发失败!_beeware-程序员宅基地
文章浏览阅读1.3w次,点赞57次,收藏92次。整理 | 郑丽媛出品 | CSDN(ID:CSDNnews)近年来,随着机器学习的兴起,有一门编程语言逐渐变得火热——Python。得益于其针对机器学习提供了大量开源框架和第三方模块,内置..._beeware
Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
文章浏览阅读7.9k次。//// ViewController.swift// Day_10_Timer//// Created by dongqiangfei on 2018/10/15.// Copyright 2018年 飞飞. All rights reserved.//import UIKitclass ViewController: UIViewController { ..._swift timer 暂停
元素三大等待-程序员宅基地
文章浏览阅读986次,点赞2次,收藏2次。1.硬性等待让当前线程暂停执行,应用场景:代码执行速度太快了,但是UI元素没有立马加载出来,造成两者不同步,这时候就可以让代码等待一下,再去执行找元素的动作线程休眠,强制等待 Thread.sleep(long mills)package com.example.demo;import org.junit.jupiter.api.Test;import org.openqa.selenium.By;import org.openqa.selenium.firefox.Firefox.._元素三大等待
Java软件工程师职位分析_java岗位分析-程序员宅基地
文章浏览阅读3k次,点赞4次,收藏14次。Java软件工程师职位分析_java岗位分析
Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
文章浏览阅读2k次。Java:Unreachable code的解决方法_java unreachable code
标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地
文章浏览阅读1w次。1、html中设置标签data-*的值 标题 11111 222222、点击获取当前标签的data-url的值$('dd').on('click', function() { var urlVal = $(this).data('ur_如何根据data-*属性获取对应的标签对象