【MDVRP】基于matlab遗传算法求解带距离的多车场车辆路径规划问题(含单线路局部优化)【含Matlab源码 1170期】-程序员宅基地
技术标签: matlab Matlab路径规划(进阶版)
博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
个人主页:海神之光
代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
️座右铭:行百里者,半于九十。
更多Matlab仿真内容点击
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
一、VRP简介
1 VRP基本原理
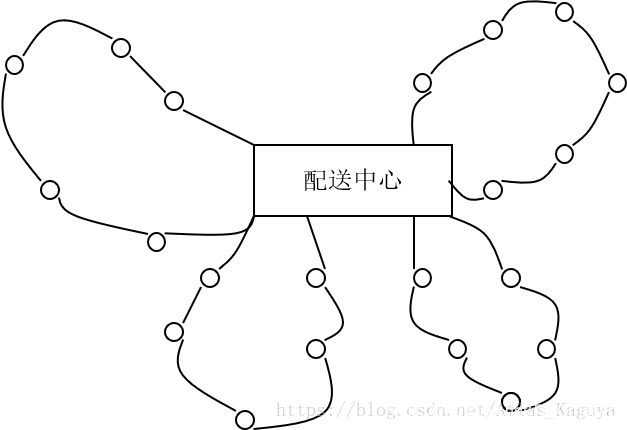
车辆路径规划问题(Vehicle Routing Problem,VRP)是运筹学里重要的研究问题之一。VRP关注有一个供货商与K个销售点的路径规划的情况,可以简述为:对一系列发货点和收货点,组织调用一定的车辆,安排适当的行车路线,使车辆有序地通过它们,在满足指定的约束条件下(例如:货物的需求量与发货量,交发货时间,车辆容量限制,行驶里程限制,行驶时间限制等),力争实现一定的目标(如车辆空驶总里程最短,运输总费用最低,车辆按一定时间到达,使用的车辆数最小等)。
VRP的图例如下所示:
2 问题属性与常见问题
车辆路径问题的特性比较复杂,总的来说包含四个方面的属性:
(1)地址特性包括:车场数目、需求类型、作业要求。
(2)车辆特性包括:车辆数量、载重量约束、可运载品种约束、运行路线约束、工作时间约束。
(3)问题的其他特性。
(4)目标函数可能是总成本极小化,或者极小化最大作业成本,或者最大化准时作业。
3 常见问题有以下几类:
(1)旅行商问题
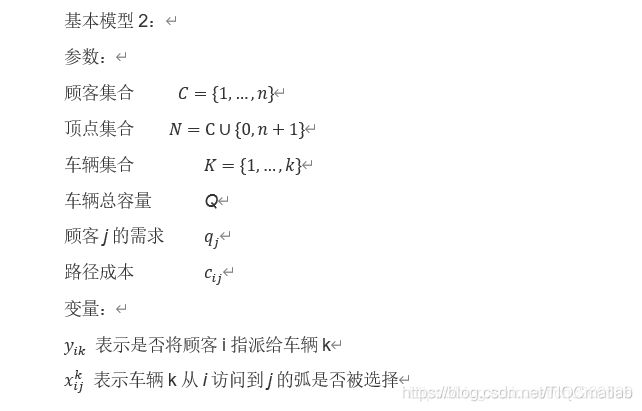
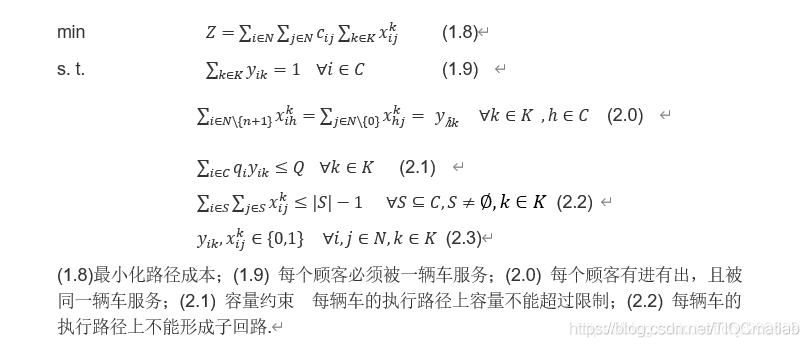
(2)带容量约束的车辆路线问题(CVRP)
该模型很难拓展到VRP的其他场景,并且不知道具体车辆的执行路径,因此对其模型继续改进。

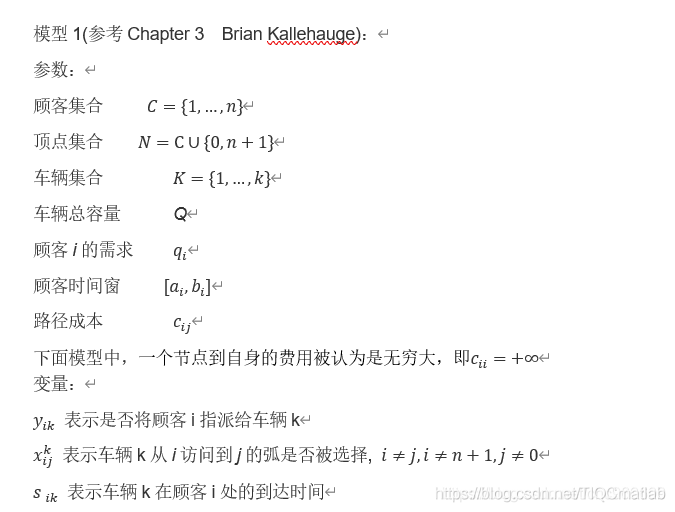
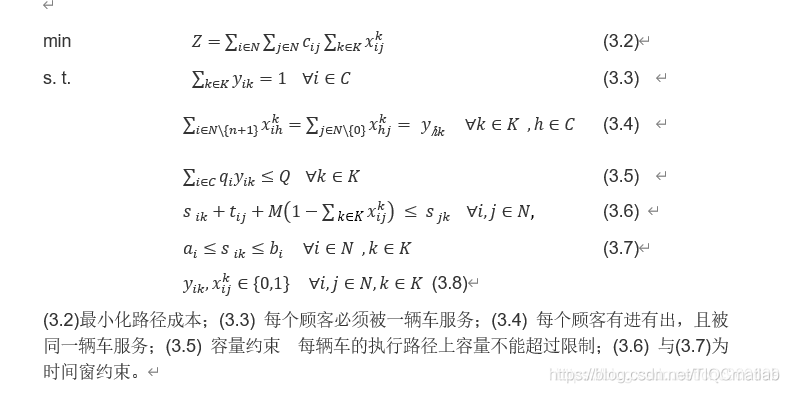
(3)带时间窗的车辆路线问题
由于VRP问题的持续发展,考虑需求点对于车辆到达的时间有所要求之下,在车辆途程问题之中加入时窗的限制,便成为带时间窗车辆路径问题(VRP with Time Windows, VRPTW)。带时间窗车辆路径问题(VRPTW)是在VRP上加上了客户的被访问的时间窗约束。在VRPTW问题中,除了行驶成本之外, 成本函数还要包括由于早到某个客户而引起的等待时间和客户需要的服务时间。在VRPTW中,车辆除了要满足VRP问题的限制之外,还必须要满足需求点的时窗限制,而需求点的时窗限制可以分为两种,一种是硬时窗(Hard Time Window),硬时窗要求车辆必须要在时窗内到达,早到必须等待,而迟到则拒收;另一种是软时窗(Soft Time Window),不一定要在时窗内到达,但是在时窗之外到达必须要处罚,以处罚替代等待与拒收是软时窗与硬时窗最大的不同。
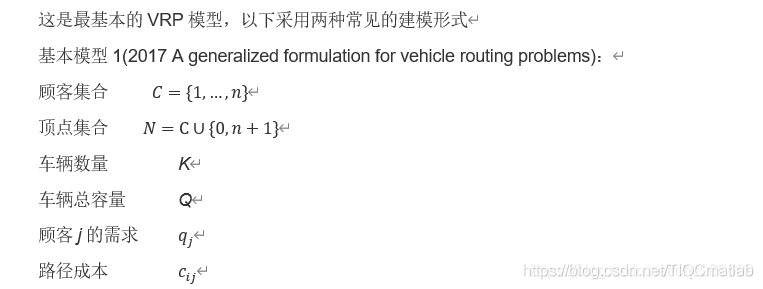
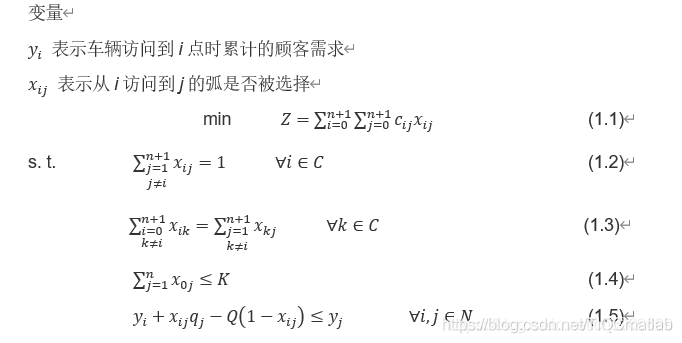
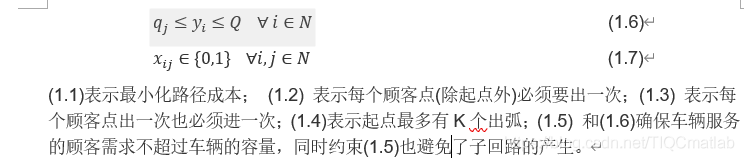
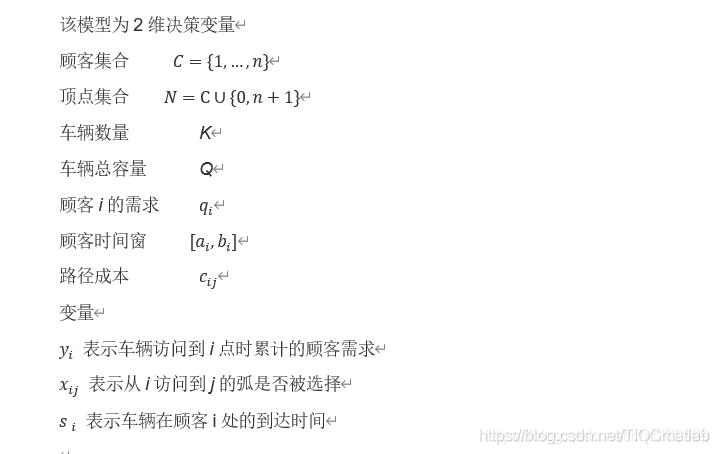
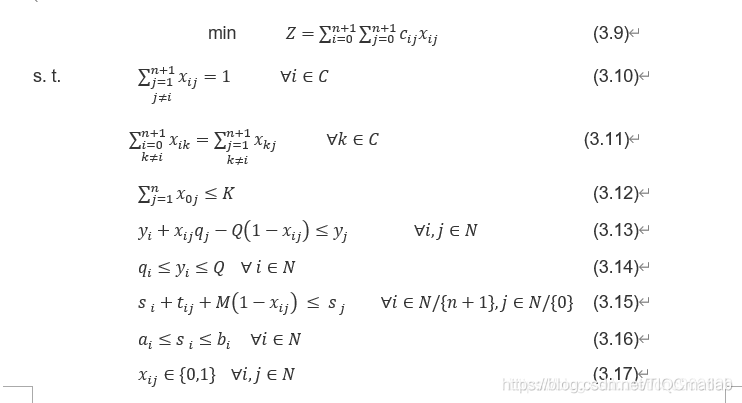
模型2(参考2017 A generalized formulation for vehicle routing problems):
该模型为2维决策变量

(4)收集和分发问题
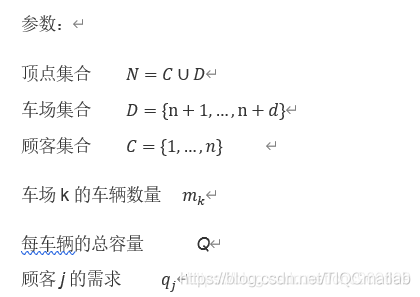
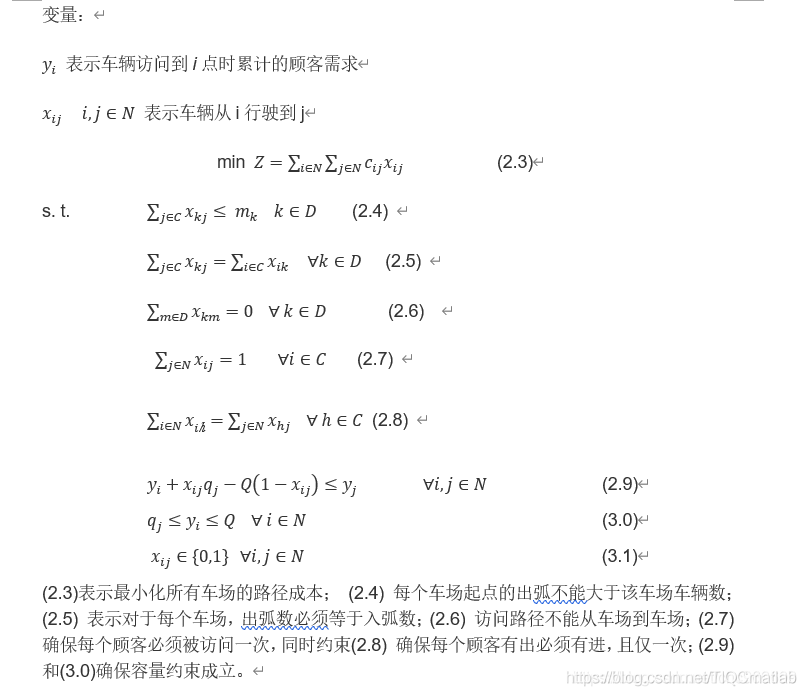
(5)多车场车辆路线问题
参考(2005 lim,多车场车辆路径问题的遗传算法_邹彤, 1996 renaud)
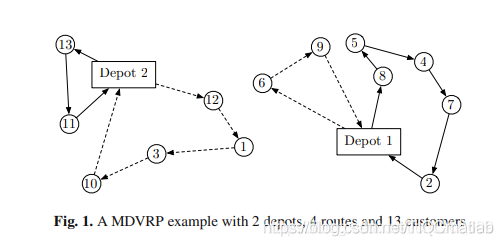
由于车辆是同质的,这里的建模在变量中没有加入车辆的维度。
(6)优先约束车辆路线问题
(7)相容性约束车辆路线问题
(8)随机需求车辆路线问题
4 解决方案
(1)数学解析法
(2)人机交互法
(3)先分组再排路线法
(4)先排路线再分组法
(5)节省或插入法
(6)改善或交换法
(7)数学规划近似法
(8)启发式算法
5 VRP与VRPTW对比

二、遗传算法简介
三、部分源代码
%遗传算法 VRP 问题 Matlab实现
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%tic%计时器
clear;
clc
W=80; %每辆车的载重量
Citynum=50; %客户数量
Stornum=4;%仓库个数
%C %%第二三列 客户坐标,第四列 客户需求 51,52,53,54为四个仓库
load(‘p01-n50-S4-w80.mat’); %载入测试数据,n客户服务点数,S仓库个数,w车辆载重量
load(‘p02-n50-S4-w160.mat’);
load(‘p04-n100-S2-w100.mat’);
load(‘p05-n100-S2-w200.mat’);
load(‘p06-n100-S3-w100.mat’);
G=100;%种群大小
[dislist,Clist]=vrp;%dislist为距离矩阵 ,Clist为点坐标矩阵及客户需
L=[];%存每个种群的回路长度
for i=1:G
Parent(i,:)=randperm(Citynum);%随机产生路径
L(i,1)=curlist(Citynum,Clist(:,4),W,Parent(i,:),Stornum,dislist);
end
Pc=0.8;%交叉比率
Pm=0.3;%变异比率
species=Parent;%种群
children=[];%子代
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%
disp(‘正在运行,时间比较长,请稍等…’)
g=1;
for generation=1:g
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
tic
fprintf(‘\n正在进行第%d次迭代,共%d次…’,generation,g);
Parent=species;%子代变成父代
children=[];%子代
Lp=L;
%选择交叉父代
[n m]=size(Parent);
%交叉,代处理
for i=1:n
for j=i:n
if rand<Pc
crossover
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
[n m]=size(Parent);
for i=1:n
if rand<Pm
parent=Parent(i,:);%变异个体
X=floor(randCitynum)+1;
Y=floor(randCitynum)+1;
Z=parent(X);
parent(X)=parent(Y);
parent(Y)=Z; %基因交换变异
children=[children;parent];
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%计算子代适应值(即路径长度) (这块用时比较长)
[m n]=size(children);
Lc=zeros(m,1);%子代适应值
for i=1:m
Lc(i,1)=curlist(Citynum,Clist(:,4),W,children(i,:),Stornum,dislist);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%淘汰子代 剩余前G个最优解
[m n]=size(children);
if(m>G)
[m n]=sort(Lc);
children=children(n(1:G);
Lc=Lc(n(1:G));
end
%淘汰种群
species=[children;Parent];
L=[Lc;Lp];
[m n]=sort(L);
species=species(n(1:G); %更新世代
L=L(n(1:G));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%加入Opt优化
%分配仓库进行opt
temp=initialStor(Citynum,Clist(:,4),W,species(1,:),Stornum,dislist);%存储分配仓库后的结果【52 14 5 52 53 6 9 8 53…】
Rbest=temp;
L_best=L(1);
[m n]=size(temp);
start=1;
car=[];%存放opt优化后的结果
i=2;
while (i<n+1)
if (temp(i)>Citynum)
cur=[];
cur=Opt(i-start,[1:i-start,1:i-start],dislist,temp(start:i-1),Citynum);
car=[car,[cur,cur(1)]];
start=i+1;
i=i+2;
else
i=i+1;
end
end
function F=CalDist(dislist,s,Citynum)%计算回路路径距离
DistanV=0;%初始距离为0
n=size(s,2);%n为s矩阵的列数,s应为一个线路里有几个点的矩阵
for i=1:(n-1)
if(s(i)>Citynum && s(i+1)>Citynum)
else
DistanV=DistanV+dislist(s(i),s(i+1));
end
end
F=DistanV;
end
%OX顺序交叉策略
P1=Parent(i,:);
P2=Parent(j,:);
%选择切点,交换中间部分 并且 修复基因
X=floor(rand*(m-2))+2;
Y=floor(rand*(m-2))+2;
if X>Y
Z=X;
X=Y;
Y=Z;
end
change1=P1(X:Y);
change2=P2(X:Y);
%开始修复 Order Crossover
%1.列出基因
p1=[P1(Y+1:end),P1(1:X-1),change1];
p2=[P2(Y+1:end),change2,P2(1:X-1)];
%2.1删除已有基因 P1
for i=1:length(change2)
p1(find(p1==change2(i)))=[];
end
%2.2删除已有基因 P2
for i=1:length(change1)
p2(find(p2==change1(i)))=[];
end
%3.1修复 P1
P1=[p1(m-Y+1:end),change2,p1(1:m-Y)];
%3.1修复 P2
P2=[change1,p2(m-Y+1:end),p2(1:m-Y)];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%加入子代
children=[children;P1;P2];
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
智能推荐
oracle 12c 集群安装后的检查_12c查看crs状态-程序员宅基地
文章浏览阅读1.6k次。安装配置gi、安装数据库软件、dbca建库见下:http://blog.csdn.net/kadwf123/article/details/784299611、检查集群节点及状态:[root@rac2 ~]# olsnodes -srac1 Activerac2 Activerac3 Activerac4 Active[root@rac2 ~]_12c查看crs状态
解决jupyter notebook无法找到虚拟环境的问题_jupyter没有pytorch环境-程序员宅基地
文章浏览阅读1.3w次,点赞45次,收藏99次。我个人用的是anaconda3的一个python集成环境,自带jupyter notebook,但在我打开jupyter notebook界面后,却找不到对应的虚拟环境,原来是jupyter notebook只是通用于下载anaconda时自带的环境,其他环境要想使用必须手动下载一些库:1.首先进入到自己创建的虚拟环境(pytorch是虚拟环境的名字)activate pytorch2.在该环境下下载这个库conda install ipykernelconda install nb__jupyter没有pytorch环境
国内安装scoop的保姆教程_scoop-cn-程序员宅基地
文章浏览阅读5.2k次,点赞19次,收藏28次。选择scoop纯属意外,也是无奈,因为电脑用户被锁了管理员权限,所有exe安装程序都无法安装,只可以用绿色软件,最后被我发现scoop,省去了到处下载XXX绿色版的烦恼,当然scoop里需要管理员权限的软件也跟我无缘了(譬如everything)。推荐添加dorado这个bucket镜像,里面很多中文软件,但是部分国外的软件下载地址在github,可能无法下载。以上两个是官方bucket的国内镜像,所有软件建议优先从这里下载。上面可以看到很多bucket以及软件数。如果官网登陆不了可以试一下以下方式。_scoop-cn
Element ui colorpicker在Vue中的使用_vue el-color-picker-程序员宅基地
文章浏览阅读4.5k次,点赞2次,收藏3次。首先要有一个color-picker组件 <el-color-picker v-model="headcolor"></el-color-picker>在data里面data() { return {headcolor: ’ #278add ’ //这里可以选择一个默认的颜色} }然后在你想要改变颜色的地方用v-bind绑定就好了,例如:这里的:sty..._vue el-color-picker
迅为iTOP-4412精英版之烧写内核移植后的镜像_exynos 4412 刷机-程序员宅基地
文章浏览阅读640次。基于芯片日益增长的问题,所以内核开发者们引入了新的方法,就是在内核中只保留函数,而数据则不包含,由用户(应用程序员)自己把数据按照规定的格式编写,并放在约定的地方,为了不占用过多的内存,还要求数据以根精简的方式编写。boot启动时,传参给内核,告诉内核设备树文件和kernel的位置,内核启动时根据地址去找到设备树文件,再利用专用的编译器去反编译dtb文件,将dtb还原成数据结构,以供驱动的函数去调用。firmware是三星的一个固件的设备信息,因为找不到固件,所以内核启动不成功。_exynos 4412 刷机
Linux系统配置jdk_linux配置jdk-程序员宅基地
文章浏览阅读2w次,点赞24次,收藏42次。Linux系统配置jdkLinux学习教程,Linux入门教程(超详细)_linux配置jdk
随便推点
matlab(4):特殊符号的输入_matlab微米怎么输入-程序员宅基地
文章浏览阅读3.3k次,点赞5次,收藏19次。xlabel('\delta');ylabel('AUC');具体符号的对照表参照下图:_matlab微米怎么输入
C语言程序设计-文件(打开与关闭、顺序、二进制读写)-程序员宅基地
文章浏览阅读119次。顺序读写指的是按照文件中数据的顺序进行读取或写入。对于文本文件,可以使用fgets、fputs、fscanf、fprintf等函数进行顺序读写。在C语言中,对文件的操作通常涉及文件的打开、读写以及关闭。文件的打开使用fopen函数,而关闭则使用fclose函数。在C语言中,可以使用fread和fwrite函数进行二进制读写。 Biaoge 于2024-03-09 23:51发布 阅读量:7 ️文章类型:【 C语言程序设计 】在C语言中,用于打开文件的函数是____,用于关闭文件的函数是____。
Touchdesigner自学笔记之三_touchdesigner怎么让一个模型跟着鼠标移动-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏13次。跟随鼠标移动的粒子以grid(SOP)为partical(SOP)的资源模板,调整后连接【Geo组合+point spirit(MAT)】,在连接【feedback组合】适当调整。影响粒子动态的节点【metaball(SOP)+force(SOP)】添加mouse in(CHOP)鼠标位置到metaball的坐标,实现鼠标影响。..._touchdesigner怎么让一个模型跟着鼠标移动
【附源码】基于java的校园停车场管理系统的设计与实现61m0e9计算机毕设SSM_基于java技术的停车场管理系统实现与设计-程序员宅基地
文章浏览阅读178次。项目运行环境配置:Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。项目技术:Springboot + mybatis + Maven +mysql5.7或8.0+html+css+js等等组成,B/S模式 + Maven管理等等。环境需要1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。_基于java技术的停车场管理系统实现与设计
Android系统播放器MediaPlayer源码分析_android多媒体播放源码分析 时序图-程序员宅基地
文章浏览阅读3.5k次。前言对于MediaPlayer播放器的源码分析内容相对来说比较多,会从Java-&amp;gt;Jni-&amp;gt;C/C++慢慢分析,后面会慢慢更新。另外,博客只作为自己学习记录的一种方式,对于其他的不过多的评论。MediaPlayerDemopublic class MainActivity extends AppCompatActivity implements SurfaceHolder.Cal..._android多媒体播放源码分析 时序图
java 数据结构与算法 ——快速排序法-程序员宅基地
文章浏览阅读2.4k次,点赞41次,收藏13次。java 数据结构与算法 ——快速排序法_快速排序法