
”轨迹规划“ 的搜索结果
matlab 机器人运动学 轨迹规划 正逆解
四自由度机械臂抓+轨迹规划(关节空间轨迹规划和笛卡尔空间轨迹规划)
机械臂轨迹规划之笛卡尔空间直线规划matlab仿真程序 在机械臂作业过程中,我们常希望末端执行器在空间中距离较远的两点间作直线运动,而对应的轨迹规划方法称为直线规划。 首先考虑对位置的插补。当起始点与目标点的...
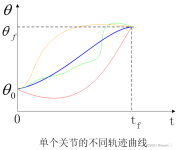
机械臂轨迹规划之三次多项式插值规划matlab仿真程序 多项式插值(polynomial interopolation)在工业中的应用十分常见,常用的几种多项式插值法有:直接法、拉格朗日插值法和牛顿插值法。多项式插值轨迹规划也是一种...
常用的多项式规划一般泛指3次、5次和7次等多项式规划,4次多项式规划用到的比较少,暂不介绍。为什么奇数次多项式比较常用呢?因为其有偶数个系数!偶数个系数有什么用呢?能列偶数个方程来求解,偶数个方程可能包括...
本文主要介绍了六自由度机械臂的建模仿真,并针对该机械臂的运动学正逆解、动力学建模仿真与轨迹规划进行了详细讨论。首先,介绍了机械臂的运动学原理,并提供了雅克比矩阵求解的方法。机械臂的运动学正逆解是确定...
轨迹规划是指在自动控制系统中确定运动路径的过程,通过算法和技术规划机器或车辆的运动轨迹,以实现特定任务或目标。该过程涉及考虑环境约束、动力学条件和性能指标,以确保系统在实际运动中安全、高效地完成任务。...
轨迹规划的任务是计算出一个无碰撞可执行的轨迹(包含路径和速度信息),保证车辆从起点安全的驾驶到目的地,并尽可能高效。其问题的本质是一个多目标的数学优化问题。 优化目标 主要的优化目标包括: 安全性:避免...
提供了机械手模型的建立、轨迹的生成等程序。
Minimum Snap轨迹规划详解(1)轨迹规划入门
机器人的运动学正解是通过给定机器人的关节角度...本文将围绕这一主题展开,探讨雅克比矩阵求解和蒙特卡洛采样在机器人末端执行器工作空间的应用,以及基于时间最优的改进粒子群优化算法在机械臂轨迹规划设计中的应用。
毕业设计四自由度机械臂的轨迹规划matlab仿真源码+数据(高分项目).zip 已获导师指导并通过的高分毕业设计项目,也可作为课程设计和期末大作业,下载即用无需修改,项目完整确保可以运行。 毕业设计四自由度机械...

运动规划/路径规划/轨迹规划
标签: path
引言查阅互联网资料与相关文献,略作总结,以期完善:运动规划、路径规划、轨迹规划的联系与区别? motion planning path planning trajectory planning
机械臂轨迹规划之五次多项式插值规划matlab仿真代码
六自由度机械臂多项式计算程序,部分C++源程序
MATLAB机器人仿真 机器人搬运过程仿真,搬运运动过程,仿真过程,末端位移曲线,关节位移速度加速度曲线分析,搬运轨迹,轨迹规划,工作空间分析,多物体搬运,机械臂连杆。机器人搬运运动过程仿真。
本文将着重介绍MATLAB中机器人运动学正逆解、动力学建模仿真以及轨迹规划的相关技术,并且结合雅克比矩阵求解和多项式函数插值,进一步深入探讨抛物线插值轨迹规划的方法。机器人运动学正逆解是机器人控制中的重要...
参考:https://www.cnblogs.com/dengwenwu/p/8886591.html https://blog.csdn.net/wx545644217/article/details/54175035
基于matlab机器人工具箱,实现机械臂末端圆弧轨迹规划
Matlab毕业设计—四自由度机械臂的轨迹规划研究,已获高分通过项目。 Matlab毕业设计—四自由度机械臂的轨迹规划研究要实现的功能是通过上位机实现轨迹规划功能。 系统环境为Windows 10 软件环境为Matlab、Qt5。 ...
Matlab毕业设计—四自由度机械臂的轨迹规划研究,已获高分通过项目。 Matlab毕业设计—四自由度机械臂的轨迹规划研究要实现的功能是通过上位机实现轨迹规划功能。 系统环境为Windows 10 软件环境为Matlab、Qt5。 ...
目前,机器人轨迹规划问题仍然是人工智能领域的一项重要研究内容,大部分用于工业生产的机器依然为串联的非线性空间连杆机构,该机构在机器人结构和各关节力矩、转角等方面设置了许多限制条件,为了将工业机器人的...
六自由度机器人轨迹规划(matlab程序+word报告+solidworks模型)
目前,机器人轨迹规划问题仍然是人工智能领域的一项重要研究内容,大部分用于工业生产的机器依然为串联的非线性空间连杆机构,该机构在机器人结构和各关节力矩、转角等方面设置了许多限制条件,为了将工业机器人的...
目前,机器人轨迹规划问题仍然是人工智能领域的一项重要研究内容,大部分用于工业生产的机器依然为串联的非线性空间连杆机构,该机构在机器人结构和各关节力矩、转角等方面设置了许多限制条件,为了将工业机器人的...
4阶轨迹规划算法介绍1
标签: 算法
引入最大速度限制。最大速度在时刻达到,即由所确定的最大速度值为:比较给定的最大速度与计算得到的速度,若,则满足最大速度限制要求,否则,按照最大速度限制重新计算可
此资源包括机械臂轨迹规划matlab仿真代码,包括多项式仿真、焊接轨迹等功能仿真,基于6自由度关节机器人,在matlab2012上已验证,可直接建立工程运行。
推荐文章
- SMT的基本知识介绍_smt行业基础知识-程序员宅基地
- 43.基于SSM的口腔护理网站|基于SSM框架+ Mysql+Java设计与实现(可运行源码+数据库+lw)-程序员宅基地
- HTML中Table表格的使用与漂亮的表格模板_html table 样式-程序员宅基地
- Linkage Mapper中的局部和全局地图比较实践指南(含实例分析)-程序员宅基地
- 线性筛求欧拉函数-程序员宅基地
- 初中几何题_初中几何题解-程序员宅基地
- jQuery 放大镜效果_jquery放大效果-程序员宅基地
- Python构建快速高效的中文文字识别OCR_中文ocr python-程序员宅基地
- SQL语句用case when实现if-else条件逻辑_case when里面可以加if else吗-程序员宅基地
- 数据结构实验课程设计报告求工程的最短完成时间_(1)用字符文件提供数据建立aoe网络邻接表存储结构; (2)编写程序,实现图中顶点的-程序员宅基地