
”轨迹推算“ 的搜索结果
基于惯性传感器与WiFi的室内行人轨迹推算,赵世华,赵磊,为了实现室内无GPS情况下行人的运动轨迹推算,设计了一种基于智能手机惯性元件和WiFi的室内行人轨迹推算算法。该算法基于粒子滤波��
闲着无聊,于是也来发一个教程吧……新手向的,关于常用运动轨迹的算式…… 这里只讨论算式,不讨论多人化、排泄以及应用…… 1.直线运动:单位沿ang度的方向移动速度为(b/触发器周期) (最基础的运动方式) ...
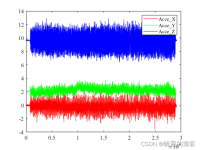
1\在MATLAB中读取IMU数据,需要先将IMU数据读入MATLAB,然后对数据进行预处理。IMU数据一般包括加速度计、陀螺仪和磁力计等 2\计算载体轨迹、速度、姿态
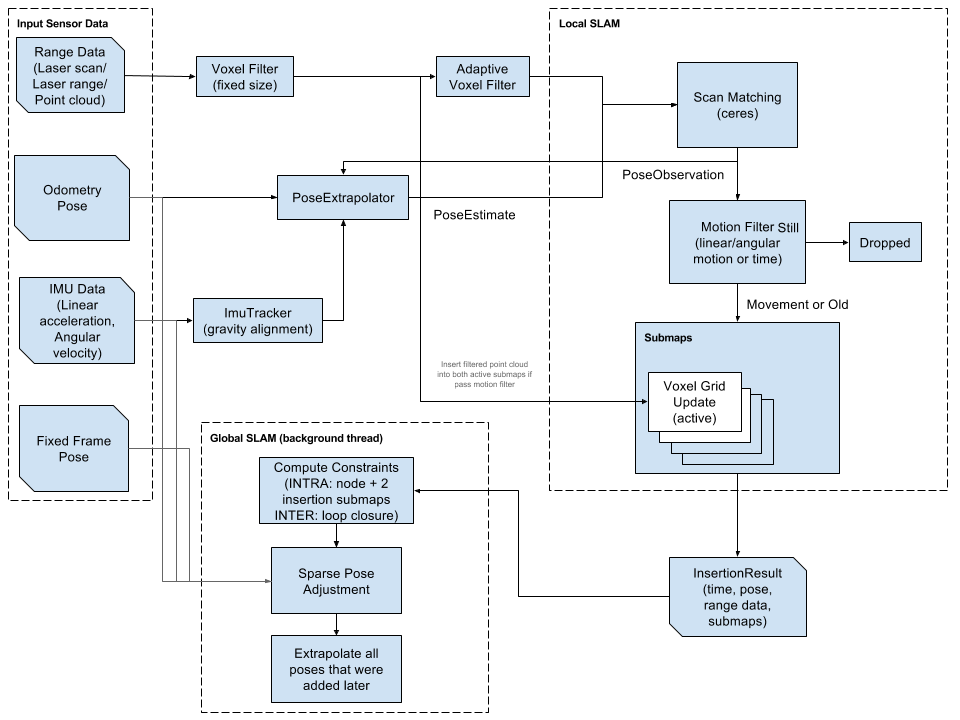
其实也就是包括两个方面的内容:类似于运动模型的位姿估计和扫描匹配,因为需要计算速度,所以时间就有必要了! 1. PoseExtrapolator解决了IMU数据、里程计和位姿信息进行融合的问题。 该类定义了三个队列。...
地理定位轨迹推算方法及系统
标签: 地理定位
地理定位轨迹推算方法及系统,介绍了地理定位轨迹的推算方法及系统的设计
Wheel-IMU跟随车轮不断旋转,安装方式和imu坐标系定义不同,在算法中的处理方式也不同。基于旋转效应对捷联惯导误差的调制作用,充分挖掘Wheel-IMU的定位能力。基于陀螺间接测量得到的车轮速度,进一步探讨由车轮...

APA+可适用自动泊车工程师使用和借鉴+其中有错误的地方环境指出来,大家共同交流;本资源可以作为泊车核心轨迹设计的理论基础,还需要大家根据自己的需求和限制,来做适配和更改。
综上所述,基于PDR算法的室内定位app可以通过行人轨迹推算算法实现连续定位,并使用卡尔曼滤波或无痕卡尔曼滤波进行轨迹优化。在实际应用中,可以根据具体的需求和环境选择适合的算法和优化方法,以实现最佳的室内...
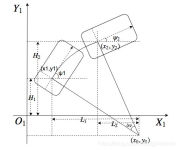
车辆轨迹跟踪算法 车辆轨迹跟踪,目前的主流方法分为两类:基于几何追踪的方法和基于模型预测的方法; 几何追踪方法–pure-pursuit (纯跟踪)算法 阿克曼几何的简化版 – 车辆单轨模型(自行车模型) 采用自行车模型...
基于几何关系的车辆轨迹计算
标签: 车辆轨迹
论文在这儿 思路1指路——从零手写VIO|第二节——imu.cpp代码解析 思路2参考资料 摘要 本文介绍了一种通用的视惯性同步定位、映射和标定的连续时间框架。我们展示了如何使用Spline参数化,以密切匹配传感器的扭矩...
kitti数据集计算IMU运动轨迹
标签: c++
4.轮速差速航迹推算 4.1 差速器 4.2 航迹推算 5.四元数与姿态解算 5.1 欧拉角 5.2 四元数 6.多重定位融合 1.简介 自动驾驶中,一般用到的导航定位技术包括,惯性导航以及GPS定位导航,惯性导航一般用到IMU,...
研制的二维里程计可同时测量掘进机横向和纵向里程增量,推导了基于二维里程和偏角的航位推算算法,得到了掘进机实时位置坐标。研发了掘进机位姿参数可视化交互式远程显示系统,搭建了包括掘进机井下、井上可视化远程...
使用地磁计、做完低通滤波后的线加速计和前10%的GPS数据确定轨迹初态。 使用陀螺仪追踪手机姿态的变化,对姿态建模,将加速度映射到世界坐标系上,并计算方向角。 使用做完低通滤波后的加速计数据来预测步幅和步频,...
航迹推演(Odometry)
标签: 机器人
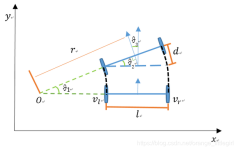
做机器人底层程序的时候,经常用到航迹推演(Odometry),无论是定位导航还是普通的方向控制。航迹推演中除了对机器人位姿进行估计,另一个很重要的关系是移动机器人前进速度、转向角速度与左轮速度、右轮速度之间的...
行人航位推算算法PDR程序完整可用
标签: PDR
行人航位推算算法,PDR代码,完整可用,matlab出行人轨迹图。
用vb6.0编写的用万有引力定律推算天体运行轨迹的小程序,这只是最初的版本,它包含了对行星参量的调节,并可实时显示不同比例尺下的轨迹,有源码。
(二)本文在车辆行为识别模型的基础上,基于LSTM提出了一种轨迹预测模型,最后提出一种加速度推算轨迹优化算法,并在NGSIM数据集上进行了仿真实验,并与不结合车辆行为识别的方法和直接输出预测轨迹的方法分别做了...
\quad连续时间内的 IMU 运动学方程: R˙=Rω∧q=12qω˙p˙=vv˙=a \dot{\mathbf{R}}=\mathbf{R}\omega ^{\wedge} \\ \dot{\mathbf{q}=\frac{1}{2}\mathbf{q}\omega}\\ \dot{\mathbf{p}}=v \\ ...
1. 背景 准确说,该项目的迹展示涉及到两个方面,一个是...随着轨迹表数据的增加,以及轨迹信息挖掘涉及到的案卷表数据的增加,项目上目前出现了比较明显的轨迹展示性能问题。 这里,我尝试从代码流程逻辑、G...
室内定位步骤 通过加速度传感器获得三轴的加速度值,通过计步算法来算出步数; 方向的获得:通过加速度传感器和磁力计共同完成,获得惯性导航坐标; 根据之前获得的指纹法坐标,两者结合卡尔曼滤波算法,获得精确的...

norad是个好东西, 同时我们可以去北美防空司令部下载各种卫星根数, http://celestrak.com/NORAD/elements/ 测试后的程序大概是这样的: 示例的下载位置为:......
推荐文章
- 计算机AMD方案不超过4000元,4000元左右AMD R5-1400配RX570全新芯片显卡电脑配置推荐...-程序员宅基地
- qt for ios扫描二维码功能实现-程序员宅基地
- 【漏洞复现】用友-U8C-反序列化-TableInputOperServlet-程序员宅基地
- 大型园区网络建设与管理-802. 1 x 认证体系7.4-程序员宅基地
- Unity Build IOS包_ios build unity-程序员宅基地
- Unity3d的安装-程序员宅基地
- Python爬虫周记之案例篇——基金净值Selenium动态爬虫-程序员宅基地
- STM32F103ZET6移植FreeRTOS_stm32f103zet6 free-程序员宅基地
- Maven之(一)Maven是什么_maven是什么?可以做哪些工作?-程序员宅基地
- 微信小程序(抖音小程序):手机号码解析失败解决方案_微信小程序解析手机号-程序员宅基地