”自动驾驶中的3D目标检测“ 的搜索结果
作者|牛牛牛肉饭 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/660216714点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击进入→自动驾驶之心技术交流群本文只做学术分享,如有侵权,...
2D目标检测在自动驾驶领域存在很多问题,因为自动驾驶的空间首先是在3D层面上的,而且需要使用RGB图像、RGB-D深度图像和激光点云,输出物体类别及在三维空间中的长宽高、旋转角等信息。这一类检测称为3D目标检测。
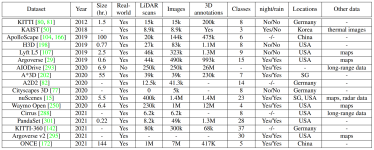
KITTI数据集是一个广泛应用于自动驾驶和计算机视觉领域的公开数据集。该数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院共同创建,旨在提供丰富的场景和多种类型的传感器数据,包括立体摄像头、激光雷达和GPS/...
VoxelNet-TensorFlow:3D目标检测的新里程 项目地址:https://gitcode.com/jeasinema/VoxelNet-tensorflow VoxelNet-TensorFlow 是一个基于TensorFlow实现的3D对象检测框架,源自著名的研究成果VoxelNet,它在处理...
点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷...具体来说,3D目标检测是一个至关重要的功能模块,因为它可以同时预测周围物体的类别、位置和大小。一般来说,自动驾驶汽车配备了多个传感器,包括摄像头和激...

推荐开源项目:CUDA-PointPillars - 高效的3D目标检测框架 项目地址:https://gitcode.com/NVIDIA-AI-IOT/CUDA-PointPillars 在这个快速发展的AI时代,深度学习和计算机视觉技术正以前所未有的速度推动着自动驾驶、...
自动驾驶目标检测技术是自动驾驶技术的重要组成部分之一,它 利用图像或传感器数据等方式来检测和识别车辆周围的行人、车辆、交通标志和信号等目 标物体。自动驾驶目标检测在复杂场景下是一个重要挑战。在这种情况下...
3D目标检测,车辆检测的立体检测,自动驾驶前沿技术。
3D目标检测跟踪_基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
在网络模型结构上,对backbone主干特征提取网络上,在自动驾驶中所需的检测精 度和检测实时性要求均需较高要求,采用ResNet、GoogleNet等参数量大的特征提取网络 无法满足自动驾驶中实时性的要求,因此对New CSP-...
近年来,随着人工智能技术以及车载感知器件的快速发展,国内外许多传统汽车企业与互联网巨头强强联手,开始在自动驾驶的战场上布局。如图1-1所示,百度、特斯拉、谷歌以及华为等科技公司已经在自动驾驶领域取得了阶段...
基于稀疏彩色点云的自动驾驶汽车3D目标检测方法.pdf
该数据集包含市区、乡村和高速公路等场景采集的数据,可用于测评立体图像,视觉测距,光流,3D目标检测和3D目标跟踪等。在KITTI数据集的数据采集平台上,装配一个Velodyne 64线机械旋转式激光雷达,2个灰度摄像机,2...
在人工智能领域,尤其是在计算机视觉中,3D目标检测是至关重要的一步,它帮助我们理解复杂环境中的三维信息。今天,我们要向大家推荐的是一个创新的、高效的3D目标检测框架——Cones-V2。这个项目源自中国阿里巴巴...

自动驾驶汽车的视觉感知系统在很大程度上依赖于3D目标检测。3D数据是在另一个层面上理解世界的关键,但不幸的是,这并不容易获得。第三个维度可以以更人性化的方式理解世界,或者更好的3D数据不是通过其RGB值来描述...
目前在机器视觉、智能算法、数据分析等多项应用场景中,深度学习取得了一系列振奋人心的成果,而卷积神经网络是其中一项尤为关键的技术[27]。卷积神经网络在特征获取和分类判别上具有较好的应用效果。本章首先介绍...


流传感器(相机和激光雷达)的工作原理和类型分类进行了研究, 针对使用数据类型及数据的表示和处理方式上对主流的算法进行分类比较, 分析各种方法在自动驾驶领域中的优缺点, 以及三维目标检测算法未来发展方向。...
MV3D论文阅读


自动驾驶之单目3D目标检测TensorRT调研,在Xavier上的推断速度,主要是CenterNet-3D算法。

推荐文章
- vuex中state对象会数组中的值更新后getters没有监听到state数据的改变的问题state数据跟新页面不刷新问题_vue对象数组改变元素没有getter-程序员宅基地
- 《Centos7——手动部署prometheus》_prometheus centos7-程序员宅基地
- iOS 数据保存几种方式总结_苹果ld都会保留那些数据-程序员宅基地
- quartus生成qdb文件_quartus 生成qxp和vqm文件的方法-程序员宅基地
- Servlet学习笔记3,及回忆。_attributeadded(servletrequestattributeevent ev)方法的-程序员宅基地
- cv::putText详解-程序员宅基地
- tomcat优化_tomcat ajp端口干嘛用的 关闭会怎么样-程序员宅基地
- (UVA)11916 Emoogle Grid-程序员宅基地
- 指针_定义一个指针变量他的值是多少-程序员宅基地
- 《Java基础——异常的捕获与抛出》_java捕获异常和抛出异常-程序员宅基地