点击上方“3D视觉工坊”,选择“星标”干货第一时间送达激光雷达感知自动驾驶中采用激光雷达做感知可以分为两个层次,低层次感知也叫作障碍物检测,只需要探测到前方有障碍物即可;高层次感知可以看做...
”激光雷达点云障碍物检测“ 的搜索结果

激光雷达点云障碍物检测。激光雷达点云障碍物检测。激光雷达点云障碍物检测。激光雷达点云障碍物检测。激光雷达点云障碍物检测。

激光雷达点云障碍物检测代码.zip
标签: 毕设
1.版本:matlab2014/2019a/2021a,内含运行结果,不会运行可私信 2.领域:智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多内容可点击博主头像 ...
1.版本:matlab2014/2019a/2021a,内含运行结果,不会运行可私信 2.领域:智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多内容可点击博主头像 ...
render.h 文件中实现和构建了用于渲染环境使用的函数和结构体 // Functions and structs used to render the enviroment 用于环境渲染的函数和结构体 // such as cars and the highway #ifndef RENDER_H ...
processPointClouds.cpp中滤波部分我单独拿出进行学习,滤波后只考虑每一帧点云中汽车周围部分点云 原始点云如下: 滤波后点云如下: 之后在对其进行分割检测等操作,滤波代码如下: #include <iostream...
今天看代码时候发现这个代码的作者真的是很有心,一边手动实现了一些算法,一边调用了点云库中的函数,都很值得学习 分割效果: 代码: #include <iostream> #include <pcl/io/io.h> #include <...
基于MATLAB实现的激光雷达点云分割和障碍物检测。基于MATLAB实现的激光雷达点云分割和障碍物检测。基于MATLAB实现的激光雷达点云分割和障碍物检测。基于MATLAB实现的激光雷达点云分割和障碍物检测。
主函数 #include "lidar.h" #include "render.h" #include "processPointClouds.h" // using templates for processPointClouds so also include .cpp to help linker #include "processPointClouds.cpp" ...
本部分对滤波后的点云分割出地面,以便后续将地面上的点云在进行聚类分割检测。 分割效果如下: 代码如下: #include <iostream> #include <pcl/io/io.h> #include <pcl/io/pcd_io.h> #...
自己理解的注释。 cluster3d.h #ifndef PLAYBACK_CLUSTER3D_H #define PLAYBACK_CLUSTER3D_H #include <pcl/common/common.h> #include <chrono> ... // shorthand for point cloud

processPointClouds.h // PCL lib Functions for processing point clouds #ifndef PROCESSPOINTCLOUDS_H_ #define PROCESSPOINTCLOUDS_H_ #include <pcl/io/pcd_io.h> #include <...
ransac3d.h // // Created by hyin on 2020/3/25. // #ifndef PLAYBACK_RANSAC3D_H #define PLAYBACK_RANSAC3D_H #include <unordered_set> //基于哈希表的关联容器 ... // shorthand for point c


在实际应用中,由于激光扫描采集的距离较远,但是根据功能需求的不同可能只关心一定区域内的数据,比如低速物流车的运营场景,可能在X方向只关心前后60米,Y方向只关心左右20米的范围。此时就可以利用直通滤波器提取...
本文提出了一种全自动的...成功实现了快速、稳定、可靠的障碍物检测,其中检测准确率与检测耗时分别为 95.52%与约 lOOms。 本文的研究实现了多激光雷达在时间与空间上的高度融合,并且加入了扫描方式独特的MEMS固态激
毫米波雷达、相机、激光雷达、超声波雷达等车载传感器生产成本的降低,汽车的自动驾驶技术得到了飞速发展,在我们的日常生活中经常能看到该技术辅助汽车驾驶员进行行车。和非自动驾驶汽车相比,自动驾驶汽车存在诸多...

针对交通环境中障碍物及可通行区域检测的问题,利用改进欧氏聚类算法进行实时障碍物检测,提出一种相邻点云间距算法以实时提取道路可通行区域。对点云数据进行预处理,再通过地面坡度分离算法进行地面与非地面点云分离;...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达本文来源:计算机视觉之路,作者:山涧一壶酒,编辑:智车科技/导读/上周文章:自动驾驶中的激光雷达点云如何做特征表达,将基于Lid...
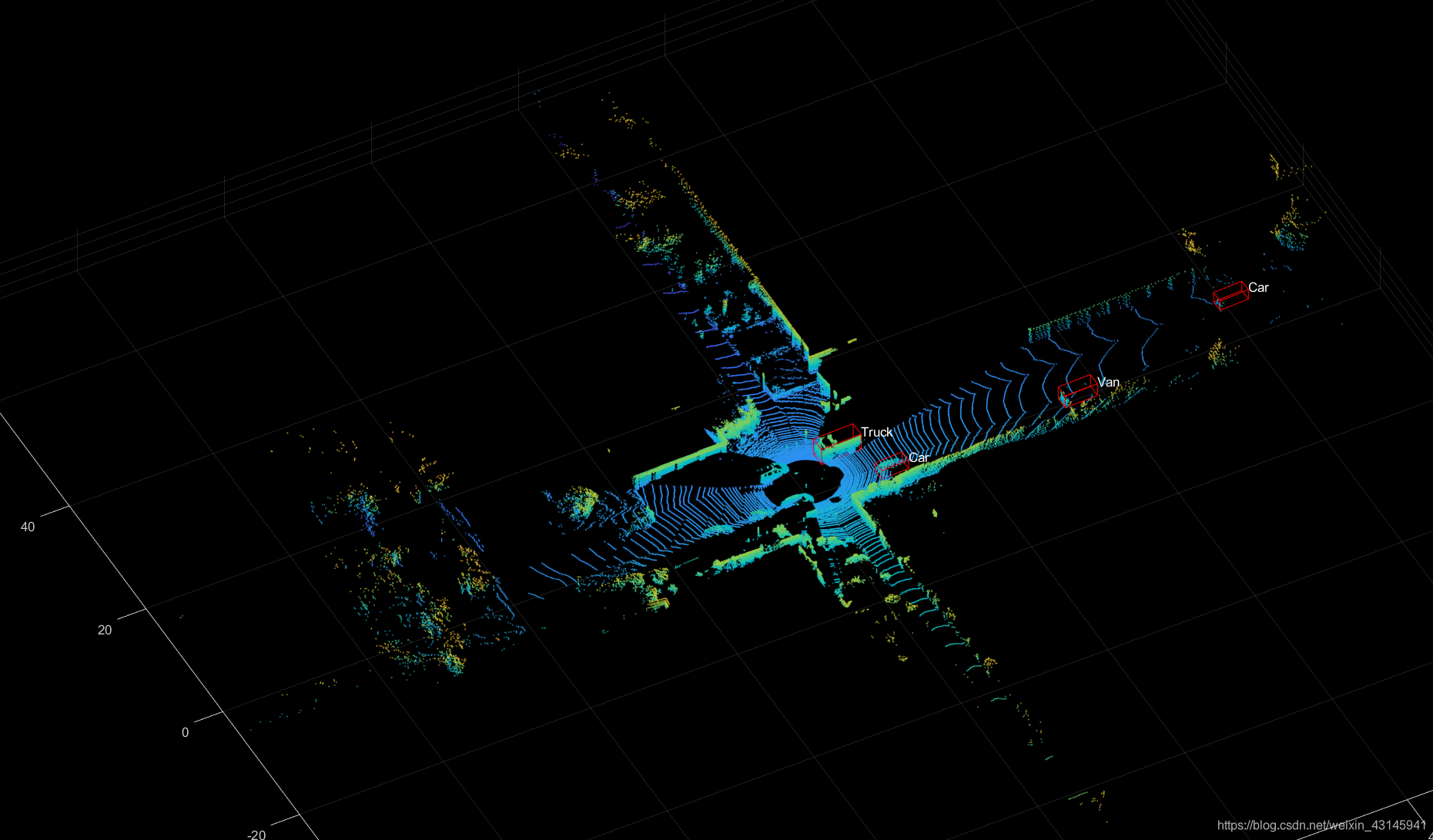
自动驾驶中采用激光雷达做感知可以分为两个层次,低层次感知也叫作障碍物检测,只需要探测到前方有障碍物即可;高层次感知可以看做目标识别,需要对障碍物信息进一步分类。 障碍物检测是指从点云数据中提取出潜在的...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章导读 本文介绍激光点云的目标跟踪算法,跟踪算法主要分为生成式和判别式两类,传统的滤波跟踪大多属于生成式,而近几年深度学习做跟踪基本...
...使用PCL中的算法实现了雷达障碍物检测的功能,正好目前也在学习这一块,下面将精度代码,学习其中算法和c++的语法 下面是代码的实现结果: 跑通代码是第一步,看懂代码是第二步! ...
推荐文章
- 一文看清:Java的核心技术是什么?_java核心技术学什么的-程序员宅基地
- 2020最佳检测 | 带有注意力RPN和多关系检测器的小样本目标检测网络(提供源码和数据及下载)...-程序员宅基地
- Linux查看GPIO状态的方法_gpio-385 (? ) out hi 显示问号-程序员宅基地
- hisi3520dv300上alc5616驱动笔记_alc5616 liux驱动-程序员宅基地
- 模型 框架效应-程序员宅基地
- [附源码]JAVA+ssm计算机毕业设计高校教材管理系统(程序+Lw)_基于ssm的教材管理平台-程序员宅基地
- FFMPeg代码分析:AVPacket结构体和av_read_frame函数-程序员宅基地
- 夜神模拟器抓包微信小程序(进入浏览器,弹出安全警告(安全证书有问题解决方法)_夜神模拟器用证书代理出现问题-程序员宅基地
- python中config命令_Python config.config方法代码示例-程序员宅基地
- QWidget添加阴影_qq widget-程序员宅基地