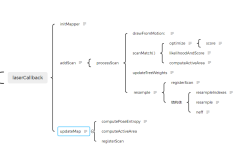
激光SLAM之Gmapping(2)算法分析解读 Gmapping的程序框架是依托Open_slam,该框架主要分成slam_gmapping和openslam_gmapping。在slam_gmapping可以从Lasercallback出发,作为整个框架的起点,Lasercallback函数...
”激光SLAM之Gmapping(2)算法分析解读_aidimoli123的博客-程序员宅基地_gmapping算法原理“ 的搜索结果
Gmapping 源码例程,源码编译,slam导航定位原理说明,Gmapping实现
它包含软件包openslam_gmapping和slam_gmapping ,这是OpenSlam Gmapping的ROS2包装器。 该包装器已通过Crystal Clemmys和Dashing Diademata成功测试。 使用slam_gmapping,您可以根据激光和移动机器人收集的数据来...
文章目录激光SLAM之Gmapping背景安装与编译算法分析1、参数解释2、算法结构 背景 Gmapping是ROS中一种开源的实时SLAM解决方案,由德国弗莱堡大学Giorgio Grisetti等编写。主要使用激光和里程计数据进行SLAM,...



slam_gmapping简单介绍


本文分析了视觉SLAM技术、无人驾驶技术以及基于ROS机器人的视觉SLAM和自主导航研究。实验针对ROS机器人平台,通过执行SLAM功能包对机器人进行了实时定位和环境建图,同时结合自主导航、自动跟随等功能包,最终实现了...
重定位方法设计
激光SLAM Gmapping官方论文Improving Grid-based SLAM with Rao-Blackwellized Particle1
ROS2经过6年的快速发展,在充分优化和大幅改进ROS1的基础上(点击了解2014年ROS2规划),功能已经非常完善了。 orb-slam2目前(2019年10月9日)官方功能包已达687。 ros-dashing功能包直接支持的SLAM包,有...
小白学移动机器人官方发布 手写SLAM算法2源码分享+运动畸变去除 适合学习理解2D激光SLAM源码的同学,该代码是在开源gmapping算法的基础之上对源码进行大刀阔斧的修改,再加上运动畸变去除模块的最终源码
slam_gmapping包也是依赖开源openslam_gmapping库。 源代码网址: slam_gmapping:https://github.com/ros-perception/slam_gmapping openslam_gmapping:https://github.com/ros-perception/openslam_gmapping ...
1、Gmapping是基于滤波SLAM框架的常用开源SLAM算法。 2、Gmapping基于RBpf粒子滤波算法,即将定位和建图过程分离,先进行定位再进行建图。 3、Gmapping在RBpf算法上做了两个主要的改进:改进提议分布和选择...
gmapping功能包集成了Rao-Blackwellized粒子滤波算法,为开发者隐去了复杂的内部实现。下图所示的是gmapping功能包的总体框架。...gmapping功能包基于openslam社区的开源SLAM算法。 在ROS的软件源中已经集成了gmappi...
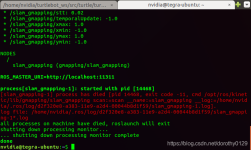
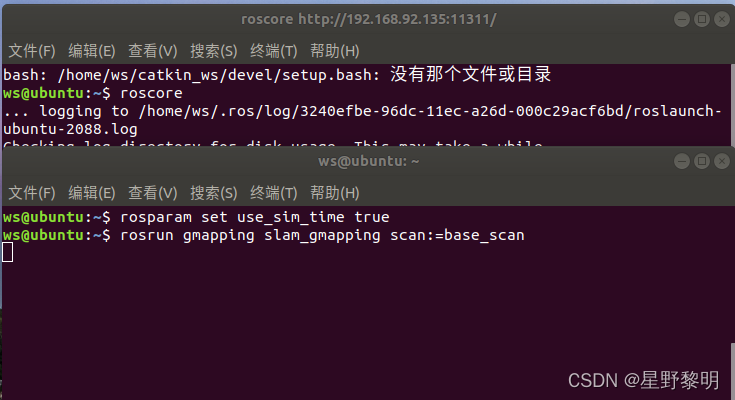
问题描述:使用turtlebot时报错(执行一些命令...ERROR: cannot launch node of type [gmapping/slam_gmapping]: gmapping ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/opt/ros/melodic/share 解决: 确实.
Scan Matching 问题描述:给定Scan和map,或者给定scan和scan或者给定map和map,找到最匹配的变换(translation+rotation) 作用:提高提议分布 方法: p(z|x,m)= beam sonsor model sensor full readings &...
gmapping 输入输出SlamGMapping类构造函数SlamGMapping() 默认构造函数完成map_to_odom 的tf初始,激光话题订阅,变换线程,随机种子,以及initSlamGMapping(ros::NodeHandle& nh, ros::NodeHandle& ...
移动机器人SLAM导航定位gmapping算法源码,可以用于带激光传感器的移动机器人导航开发应用,gmapping是基于概率与粒子滤波的算法


依靠移动机器人收集的激光和位姿数据,使用slam_gmapping可以创建2维栅格地图。 一、外部文档 主要是一个第三方包。 二、硬件需求 使用slam_gmapping,需要移动机器人提供里程计数据,并且水平安装固定激光测距仪。...
激光雷达导航相关算法(DWA路径规划)
推荐文章
- 【微服务专场】基于微服务的现代应用实践-2017CCTC大会-专题视频课程-程序员宅基地
- qq令牌64位密钥提取_qq令牌绑定工具无需密码2020-程序员宅基地
- 51单片机auxr寄存器_51单片机之printf-程序员宅基地
- contextcapture手动添加控制点(刺点)教程_contextcapture 设置像控点-程序员宅基地
- 超70%资金投资在浦东 谋定研究·中国智库:上海自贸区基金-程序员宅基地
- 50个很棒的免费工具和资源,总有一款适合您!_picsum.photo-程序员宅基地
- 「WebPack」WebPack 模块化问题_为什么webpack的版本和项目中不同-程序员宅基地
- KCF目标追踪_kcf跟踪初始化帧需要手动点选吗-程序员宅基地
- Python中的AI库有哪些?_python aigc相关库-程序员宅基地
- 悬赏任务源码|悬赏任务app源码PHP可二开_任务悬赏源码-程序员宅基地