
”深挖双目视觉定位技术细节-标定函数_sun19890716的专栏-程序员宅基地“ 的搜索结果
张正友的万能标定程序,希望对计算其视觉与机器视觉界的朋友有用,特分享

机器视觉,使用c#进行相机内参数标定有代码,有界面,有图像
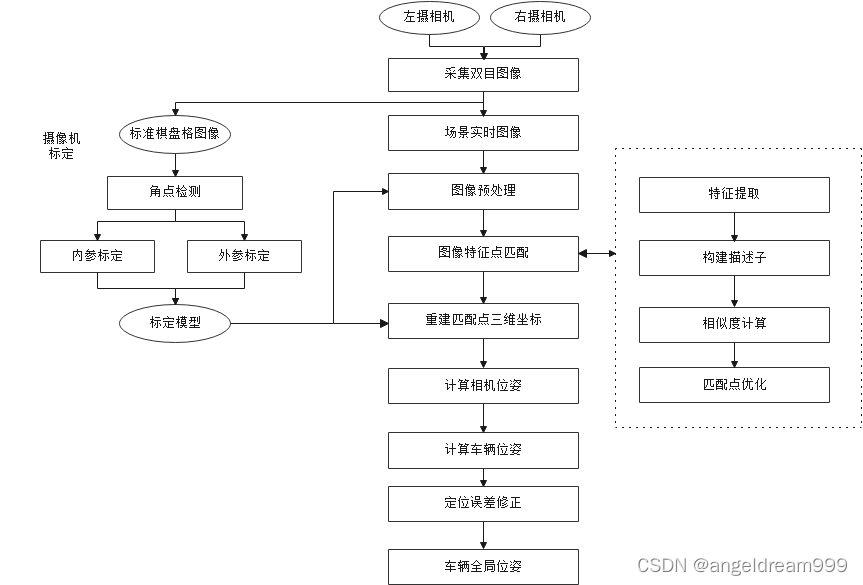
本篇文章用来记录近期学习双目视觉定位的收获,后续我将随着不断深入学习对文章进行补充 视觉是人类感知外界环境信息的重要途径,其中人类约有80%的环境信息是通过双眼获取的。双目视觉系统是典型的类人视觉模型...


双目相机 -- IMU联合标定
标签: 自动驾驶



所谓外参自标定的方法,是不用固定的标定板,在拍摄实际场景的两张图像时,进行摄像机的外参自标定,从而获取当时两个摄像机位置之间的Rotation和Translation,以上是假定摄像机的内参是固定不变的,仅仅修正外参来...

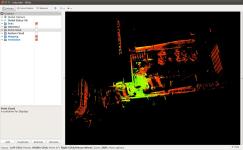
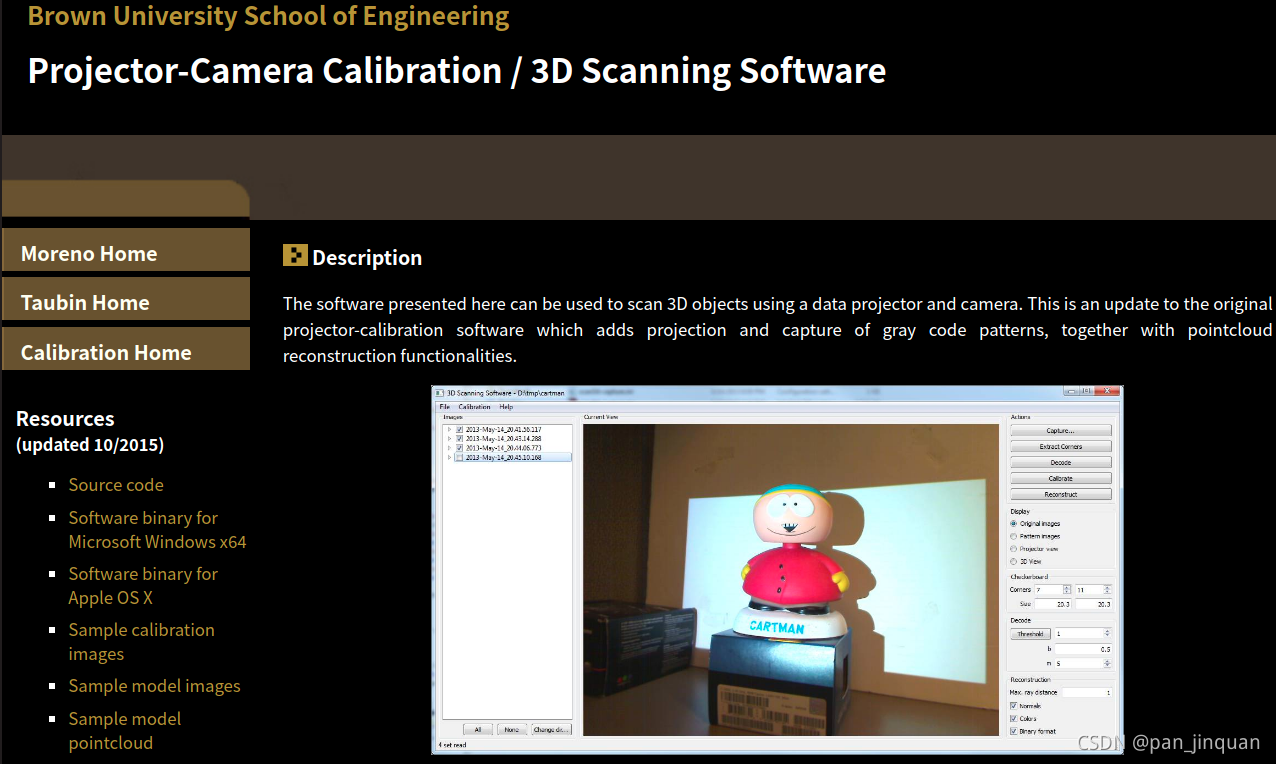
如果不太了解双目视觉原理,建议先看看这篇文章:一篇文章认识《双目立体视觉》 一、双目测距 效果 基于SGBM算法,生成视差图的效果 用鼠标点击视差图,程序会自动计算该点的世界坐标、距离,输出信息如下: ...
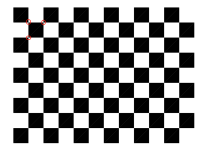
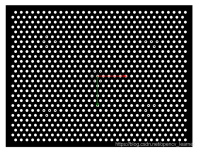
标定结果 Halcon标定过程 获取左右相机图像中标定板的区域; find_caltab(Image:CalPlate:CalPlateDescr,SizeGauss,MarkThresh,MinDiamMarks:) 参数含义: Image: 输入图像 CalPlate: 标定板区域 ...


点击上方“3D视觉工坊”,选择“星标”干货第一时间送达1双目视觉的视差与深度人类具有一双眼睛,对同一目标可以形成视差,因而能清晰地感知到三维世界。因此,计算机的一双眼睛通常用双目视觉来实...

推荐文章
- rem.js 使用-程序员宅基地
- 【Spring Boot】个人对Serializable的理解_springboot serializable-程序员宅基地
- 微众银行宣布多方大数据隐私计算平台开放体验-程序员宅基地
- Typora的换行缩进的问题_typora缩进-程序员宅基地
- 5GC基础:架构和网元_5gc架构-程序员宅基地
- 图的遍历-DFS_修改递归方式实现的图的深度优先搜索算法,将输出-程序员宅基地
- 阿里云Cent OS服务器搭建环境jdk1.7+mysql+tomcat7.0_aliyun centeros mysql-程序员宅基地
- python 将一个文件中内容添加到另一个文件指定位置_python如何将一个文本的部分数据插入到另一文本的指定行-程序员宅基地
- iphone与计算机连接,将 iPhone 与电脑同步-程序员宅基地
- 第五节--决策树_预测变量空间划分怎么对应树-程序员宅基地