
”单目3D目标检测“ 的搜索结果
本文综合整理单目3D目标检测的方法模型,包括:基于几何约束的直接回归方法,基于深度信息的方法,基于点云信息的方法。万字长文,慢慢阅读~ 直接回归方法涉及到模型包括:MonoCon、MonoDLE、MonoFlex、CUPNet、...
|-kitti-mini |-ImageSets |-test.txt |-train.txt |-trainval.txt |-val.txt |-training |-calib |-image_2 |-veloyne_2 |-label_2 |-testing |-calib |-image_2 |-veloyne_2
基于深度辅助的方法。
基于mmdection3d的单目3d目标检测,使用KITTI数据集。
MonoDLE作为一个延续CenterNet框架的单目3d检测器,在不依赖dcn的情况下获得了较好的性能,可以作为baseline。论文核心观点,主要包括为三点: 2d box中心点与投影下来的3d box中心点,存在不可忽视的差异,优先使用...
基于python的Au实时形状感知的单目3D目标检测系统(ICCV2021).zip 计算机专业,软件工程专业,通信工程大学生课程设计 自己大三的时候写的 适合大家做课程设计,写毕业设计也可以参考 基于python的课程设计

作者丨慕弋云子@知乎来源丨https://zhuanlan.zhihu.com/p/432135656编辑丨3D视觉工坊三维目标检测是一个相对上游、比较基础却又新兴的任务领域。得益于自动驾...




自动驾驶之单目3D目标检测TensorRT调研,在Xavier上的推断速度,主要是CenterNet-3D算法。


mmdetection3d是OpenMMLab开发的3D目标检测开源工具箱,里面包含了许多经典的3D目标检测算法,包含了单目3D目标检测、多目3D目标检测、点云3D目标检测、多模态3D目标检测等各个方向。我们只需要把相应的算法权重下载...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者‖ 黎国溥编辑‖3D视觉开发者社区SMOKE是一个one-stage的单目视觉障碍物检测模型,它认为2D检测对于单目3D检测任务...


本文分享 MonoDLE 的模型训练、模型推理、可视化3D检测结果。

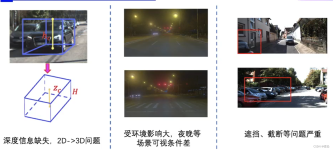
单目3D目标检测调研 一、 简介 现有的单目3D目标检测方案主要方案主要分为两类,分别为基于图片的方法和基于伪雷达点云的方法。 基于图片的方法一般通过2D-3D之间的几何约束来学习,包括目标形状信息,地面...

本文分享SMOKE最新的版本的环境搭建,以及模型训练;环境关键库版本:pytorch 1.12.0、CUDA 11.3、cudnn 8.3.2、python 3.7、DCNv2。
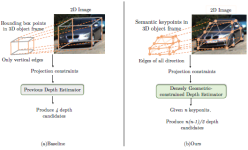
作者丨柒柒@知乎来源丨https://zhuanlan.zhihu.com/p/404683961编辑丨3D视觉工坊论文标题:AutoShape: Real-Time Shape-Awar...

推荐文章
- IndexError: list index out of range_a = [x.split('/')[1] for x in city['风力风向(夜间/白天)']]-程序员宅基地
- oracle-rdbms-server-11gR2-preinstall 的一个BUG解决_错误:软件包:oracle-rdbms-server-11gr2-preinstall-1.0-1.-程序员宅基地
- 语义分割之全卷积网络FCN论文阅读及代码实现_fcn论文原文-程序员宅基地
- Mybatis-plus查询时某些字段为null-程序员宅基地
- Java堆内存初始大小_initialheapsize 默认大小-程序员宅基地
- Cookie 跨域解决方案(顶级域名和子级域名之间的Cookie共享、修改、删除)_顶级域名和子域名存在跨域吗-程序员宅基地
- 计算文本相似度-Word2Vec计算_java word2vec 语义相似度-程序员宅基地
- 关于Ubuntu20.04下向日葵远程软件连接中断的解决方法-程序员宅基地
- 打造先进的内存KV数据库-1 B树索引的建立(1)_kv数据库 倒排索引-程序员宅基地
- Git常用命令及其作用_艾孜尔江撰-程序员宅基地