
”动作规划“ 的搜索结果
基于Frenet优化轨迹的无人车动作规划实例,使用Python实现,高速场景。 无人车 动作规划 自动驾驶 辅助驾驶 优化轨迹

在人机工效学中经常需要对人体的动作进行规划,用以评估产品的设计是否符合人机工效学,但是由于人体关节的冗余自由度使计算到达目标点的人体的动力学...改进的RRT 算法可以直接应用于人体和机器人的动力学动作规划。
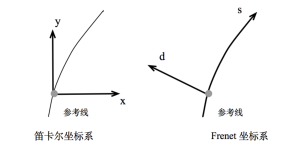
动作规划动作在无人车规划模块的最底层,它负责根据当前配置和目标配置生成一序列的动作,我们前面讨论的三次样条插值实际上只是一个简单的路径,而非我们最终能够执行的轨迹,本文介绍一种基于Frenet坐标系的优化...
。。。
自动驾驶中的路径规划与动作规划.pdf
并且建立稳定裕度角及俯仰角度与障碍高度关系的求解方法,在此基础上,进行基于最大稳定裕度的越障动作规划。最后通过实验验证了基于质心运动学模型和稳定裕度的自主越障性能分析及动作规划的正确性。
某公司2001年度广告动作规划.ppt
基于Frenet优化轨迹的无人车动作规划实例,使用Python实现,高速场景。 无人车 动作规划 自动驾驶 辅助驾驶 优化轨迹
原理参考:无人驾驶汽车系统入门(二十一)——基于Frenet优化轨迹的无人车动作规划方法 规划器的C++代码(出自CppRobotics): /************************************************************************* >...
。。。
基于似人特性的机器人拟人臂自主抓取动作规划.pdf
#资源达人分享计划#
动作规划动作在无人车规划模块的最底层,它负责根据当前配置和目标配置生成一序列的动作,我们前面讨论的三次样条插值实际上只是一个简单的路径,而非我们最终能够执行的轨迹,本文介绍一种基于Frenet坐标系的优化...
作者简介:申泽邦(Adam Shan),兰州大学在读硕士研究生,主攻无人驾驶,深度学习;动作规划动作在无人车规划模块的最底层,它负责根据当前配置和目标配置生成一序列的动作...
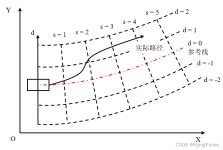
基于Frenet坐标系的动作规划方法由于是由BMW的Moritz Werling提出的,为了简便,我们在后文中也会使用Werling方法简称。在讨论基于Frenet坐标系的动作规划方法之前,我们首先得定义什么是最优的动作序列:对于横向...

无人车作为一个复杂软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知预测,以及控制规划等多个模块的协同配合工作。作者认为最关键的部分是感知预测和决策控制规划的紧密配合。狭义上...
智能规划中基于遗传算法的动作模型学习,赖志锋,姜云飞,智能规划和机器学习是人工智能领域的两个热门分支,近年来,结合这两方面的综合研究受到高度重视。本文在动作间的状态未知条件下
NAO机器人实验报告
标签: NAO机器人
NAO机器人实验报告(英文版) ①Get familiar with the operation of NAO robot, and understand the principle of how it is working. ②Learn how to use Choregraphe to program instructions to run NAO robot.

FSas算法分别从命题层和动作层出发,利用被观察到的动作效果或动作以及互斥计算减小了支持动作的空间,从而求得最终支持效果的动作,实现了规划识别。研究结果表明,该算法不仅解决了支持动作效果的动作是唯一的情况,...
无人车作为一个复杂软硬件...狭义上的决策规划控制部分,包含了无人车行为决策(Behavior Decision)、动作规划(Motion Planning), 以及反馈控制(Feedback Control)这三个模块。而从更宽泛的概念来说,无人车的...
生产与动作管理-生产系统流程能力规划.pptx
matlab开发-Frenet
标签: 未分类
matlab开发-Frenet。frenet-frenet-serret空间曲线入侵
推荐文章
- python风变编程是骗局吗-黑猫投诉:风变编程诱导消费涉及退款无人答复霸王条款...-程序员宅基地
- js php排序表格,jQuery实现表格前端排序功能详解-程序员宅基地
- rust交叉编译_rustup aarch64-unknown-linux-gnu-程序员宅基地
- Tomcat(一):简介-程序员宅基地
- RabbitMQ启动失败_没有启动 rabbitmq 服务。 请键入 net helpmsg 3521 以获得更多的帮助。-程序员宅基地
- 解释os.walk()_os.walk(data_path)-程序员宅基地
- python自助电影售票机_2019-03-20_面向对象_模拟电影院自动售票机选票[Python练习题]...-程序员宅基地
- iphone型号表_iPhone手机型号信息大全 (最新)-程序员宅基地
- Apache服务简介及编译安装详解-程序员宅基地
- Chrome 浏览器扩展程序推荐 Top 10_chrome 扩展推荐-程序员宅基地