此时,由于无人车地面运动,需要1、3通道,故只有这两的通道有反应。其中3通道为油门,1通道为航向。这里和电机也有关系,涉及到差速和电机类型,具体问题具体分析。尤其是驱动板有的同时驱动两个步进电机,要对应...
”pixhawk无人小车“ 的搜索结果
2019年打算搭建一款无人小车,具有遥控、自动走线、激光雷达避障、视觉识别等功能。 1、搭建apm开发环境 感谢阿木实验室提供开发环境,下载其提供带开发环境的虚拟机即可。下载地址如下:(该地址已经失效,见谅) ...
# Pixhawk 系列Pixhawk®(opens new window) is an independent open-hardware project providing readily-available, low-cost, and high-end, autopilot hardware designs to the academic, hobby and industrial ...
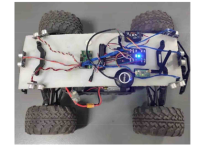
基于Pixhawk和ROS搭建自主无人车(一):底盘控制篇
硬件:PIX飞控T265D435差速小车一个软件ROSAPM/PX4opencv具体的原理就是用opencv识别线条,然后通过pid给线速度和角速度给无人车执行,具体就是调用mavros的接口(调用接口时需要注意掩码,否则可能无法控制)废话不...

无人车开发 ArduRover GPS自动驾驶 APM小车 Pixhawk
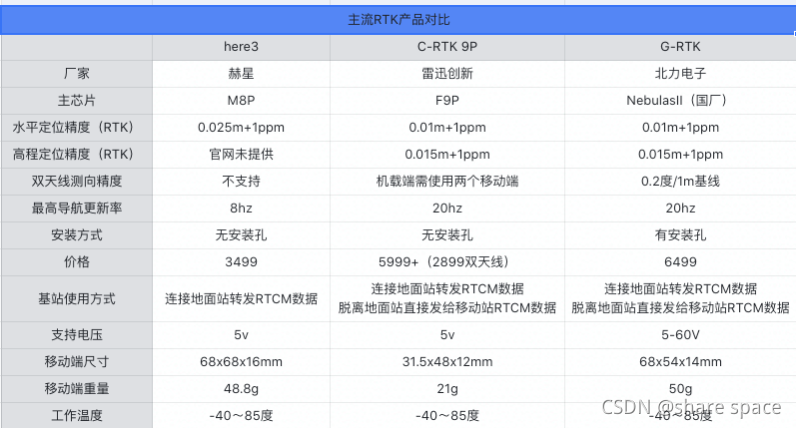
如何在基于pixhawk上的无人车,无人船,无人机上解决以上问题? 为了解决以上问题,我们找到了一个方案 千寻位置—实施高精度定位服务 千寻知寸FindCM 经过阿木实验室 夜以继日的努力 漫长的调试 ...
PX4飞控呢,则是正好和板卡通信有现成的mavlink协议,可以基于串口,PX4飞控,也正好可以输出PWM波控制电机转动,这种情况下用PX4控制小车可能比用普通的STM32控制小车,在开发量上相对小一点,至少不用自己折腾一些...






Ardupilot学习笔记
标签: 飞控
小白入门Ardupilot
PX4无人机键盘控制飞行代码
PX4系统学习扑翼飞行器的硬件组成飞控板电调电调的分类舵机2如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也...
1、pixhawk飞控的RC IN接遥控器的接收机的PPM/CH1。遥控器只需要接这个接线即可。注意飞控正面朝上,上面为接地。和遥控器接收机刚好相反。因此不要接错。如下图 2、修改遥控器配置:System -> RX Setup ->...
虽然地面站已经编译好了,源码也发给大家了,但是,要实现这个功能并且录制成视频,呈现在大家面前,让大家真实的验证这个确实是可以的,那就不仅仅需要做好地面站,还要有多架无人机或者多个无人车进行演示。...
之前的博客里提到,会替换原有的舵机、电调、遥控器,遥控器在上一篇博客...小车直接接遥控器,而不是接飞控。 注意遥控器的通道对应关系连接电调,如果连上电调后电机不运转,有可能由于没有进行行程校准。校准视...
因为小车原装遥控器接收机和电调版整合在一个小板子上,且没有相关资料,无法接入飞控。因此单独购买遥控器。在某宝上购买富斯遥控器i6,总共六个通道、三个双向开关、一个三向开关。 遥控器简单入门视频如下,...
推荐文章
- AIoT应用创新大赛-基于TencentOS Tiny 的遥控小车_智能小车连接腾讯云平台-程序员宅基地
- 睡后收益 -- 程序员宅基地打赏功能及自定义模块以及代码分享_csdn 如何开启打赏-程序员宅基地
- html5 video标签播放视频流,MP4格式,webm格式,video元素详解_video/webm-程序员宅基地
- flink写入hbase-程序员宅基地
- 2017-10-15-程序员宅基地
- YII2.0配置index.php入口文件至根目录_yii2 访问怎么默认index.php-程序员宅基地
- PD3.0详解 第十二章总结_pd3.0电压电流-程序员宅基地
- parallel_studio_xe_2018_update1_cluster_edition for Linux 安装教程_parallel_studio xe 2018安装-程序员宅基地
- Golang 学习笔记 - 流程控制_package main import-程序员宅基地
- Elasticsearch:search template_elasticsearch的search template有哪些好处-程序员宅基地