fatal error: THC/THC.h: No such file or directory 在1.10后移除了。pytorch1.13+cu117 openpcdet:0.5.2(官方只测试到pytorch1.10)在ops文件夹下的pointnet2文件夹下的含有以下两句代码的cpp文件进行注释。
”OpenPCDet“ 的搜索结果
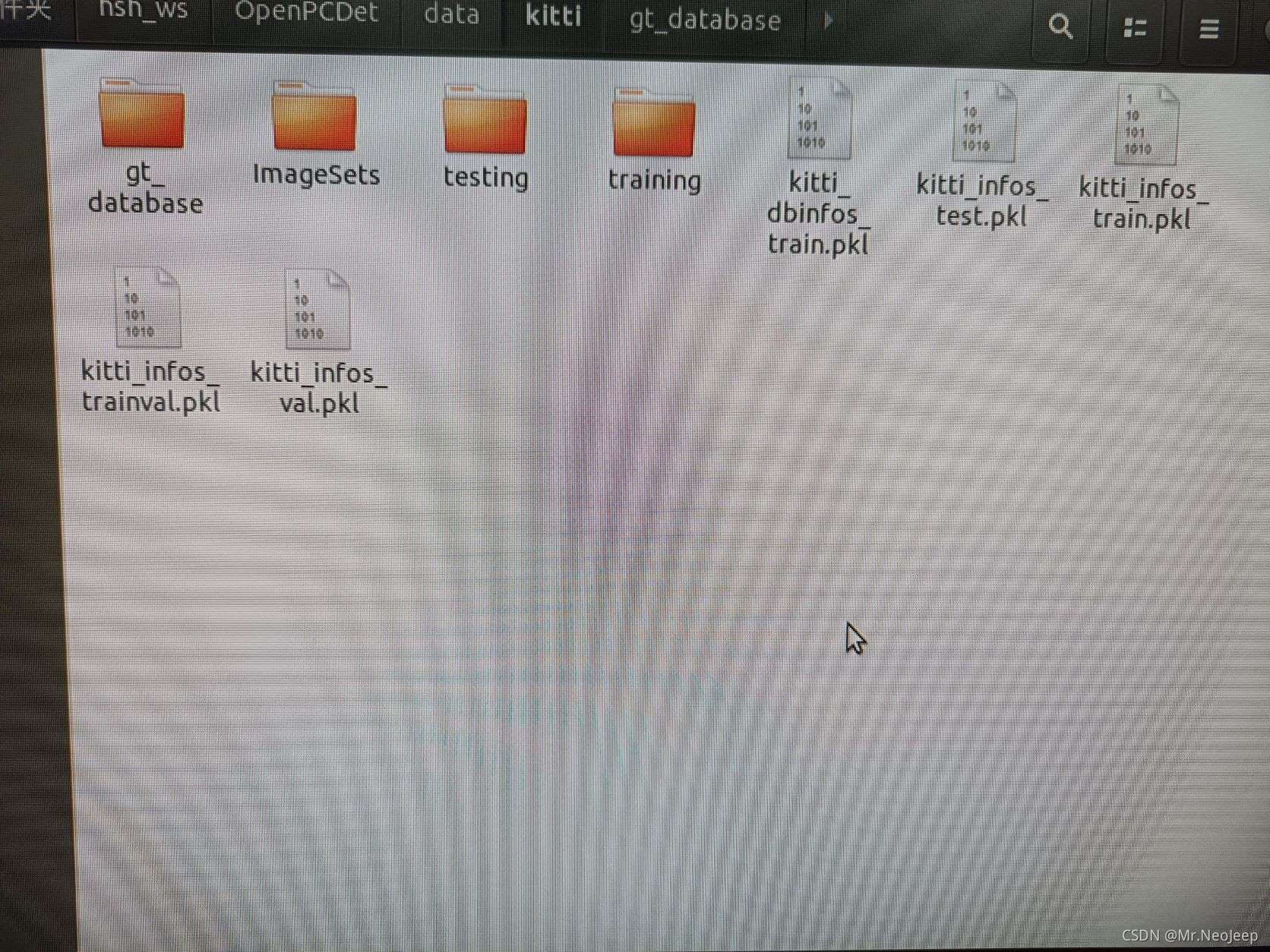
1、我获取到的雷达点云数据的pcd的,且仅仅含有xyz三个维度,强度没有,要想将自定义数据集制作为kitti的格式需要进行一些转换;Step1:需要读取pcd文件,使用open3d进行读取,并扩展0到第四维度,然后转为二进制bin...
OpenPCDet的多标签分类损失函数使用的是focal loss,进行了自定义实现,代码如下: import numpy as np import torch import torch.nn as nn class SigmoidFocalClassificationLoss(nn.Module): """ Sigmoid ...
import io as sysio import numba import numpy as np from .rotate_iou import rotate_iou_gpu_eval @numba.jit def get_thresholds(scores: np.ndarray, num_gt, num_sample_pts=41): scores.sort() # 将得分...
data_augmentor.py 注释119-120行 database_sampler.py 注释123-129行
1. 数据增强1.1 gt数据采集——gt_sampling1.2 全局翻转——random_world_flip1.3 全局旋转——random_world_rotation1.4 全局尺度变换——random_world_scaling2. 数据处理2.1 数据范围限制2.2 点云随机2.3 点云...
关于PointPillars模型的损失,其沿袭了SECOND的做法。在类别分类损失和box回归损失的同时还包含角度损失和方向损失。PointPillars中角度的编码使用真实值和Anchor的残差。但是再使用SmoothL1计算具体损失时会先计算...

具体的模型配置是在pointpillar.yaml的MODEL配置部分,可以卡件其设置VFE、MAP_TO_BEV、BACKBONE_2D、DENSE_HEAD、POST_PROCESSING几个部分。这里以PointPillars模型为例,在PointPillars模型中主要划分了以下4个...
MMDet/OpenPCDet 环境配置可能遇到的问题

OpenPCDet允许用户进行自定义数据集训练、模块和网络的创建。用户可以按照以下流程导入自定义数据集: 1. 编写自定义数据集类:用户需要编写自己的数据集类,该类应继承于OpenPCDet中的基础数据集类,并实现必要的...
spconv的安装简直要命,废了三天才安装好,多亏了网上一些教程。... 目录安装1 clone 项目2 创建并配置虚拟环境3 安装spconv3.1 git clone项目3.2 安装libboost3.3 cmake版本3.4 编译3.5 安装4 安装pcdet参考 ...

要复现OpenPCDet中的PointPillars算法,可以按照以下步骤进行操作: 1. 首先,克隆OpenPCDet的GitHub仓库到本地。可以使用以下命令进行克隆: ``` git clone https://github.com/open-mmlab/OpenPCDet.git ``` ...
回答: 要在ROS中实时运行OpenPCDet,你需要按照以下步骤进行操作。首先,将OpenPCDet工程中的OpenPCDet/tools中的全部文件以及/OpenPCDet/pcdet文件夹复制粘贴到src/pointpillars/tools文件夹下。确保没有遗漏pcdet...


docker示例
1.配置cuda10.0和cudNN7.5环境 库文件加入CUDA路径 jetson xavier默认安装了CUDA10.0,但无法直接运行nvcc -V,需要将CUDA的路径写入环境变量中 #命令行输入 sudo gedit ~/.bashrc ...
对于在Windows上安装OpenPCDet,您可以按照以下步骤进行操作: 1. 首先,确保您已经安装了Python环境。建议使用Anaconda来管理Python环境,您可以从Anaconda官网下载安装程序并按照提示进行安装。 2. 打开Anaconda...
您可以使用OpenPCDet来训练自己的数据集。首先,您需要将自己的数据集准备好,包括点云数据和对应的标注信息。然后,您可以按照以下步骤进行训练: 1. 安装OpenPCDet库。您可以通过克隆OpenPCDet的GitHub仓库来获取...
你可以使用OpenPCDet来训练自己的数据集。首先,确保你有一个包含标注信息的数据集,标注信息可以是3D框、平面、语义分割等。接下来,按照以下步骤进行操作: 1. 准备数据集:将你的数据集组织成OpenPCDet支持的...
关于虚拟机openpcdet,您是指OpenPCDet这个开源项目吗?OpenPCDet是一个基于PointRCNN和SECOND的3D目标检测库,用于点云数据的目标检测。它支持常见的3D目标检测任务,如车辆检测、行人检测和自行车检测等。您可以...
OpenPCDet是一个基于PyTorch的开源3D物体检测库,可以用来进行3D目标检测和3D物体检测。要生成.pt文件,可以执行以下步骤: 1. 准备数据集:首先需要准备好用于训练和测试的3D数据集。这些数据集应该包含点云数据和...
Openpcdet 系列 Pointpillar代码逐行解析之Voxel Feature Encoding (VFE)模块

推荐文章
- 【UBUNTU】ubuntu18.04安装及更新_ubuntu18更新-程序员宅基地
- OpenSSL心脏滴血漏洞(CVE-2014-0160)_openssl漏洞的原因是-程序员宅基地
- 数据结构实验-哈夫曼编码_待编码数据-程序员宅基地
- dataframe的索引遍历_pandas | 如何在DataFrame中通过索引高效获取数据?-程序员宅基地
- 位置传感器_lbk位置传感器-程序员宅基地
- dubbo 报错:java.lang.NoClassDefFoundError: org/I0Itec/zkclient/exception/ZkNoNodeException_dubbo nested exception is java.lang.noclassdeffoun-程序员宅基地
- Spring Boot 2.x 整合 ShardingSphere 5.0.0 实现分库分表_整合shardingsphere-jdbc-core-spring-boot-starter-程序员宅基地
- 表白编码C语言,C语言告白代码,一闪一闪亮晶晶~-程序员宅基地
- mycat_wrapper-linux-aarch64-64-程序员宅基地
- 支持向量机的核函数选择:影响性能的关键因素-程序员宅基地