”3D目标检测“ 的搜索结果


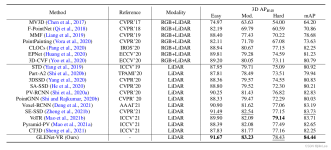
在kitti数据集上目前排名前三,文章通俗易懂(也可能是我没看懂)(这部分后面再补吧)
单目3D目标检测调研 一、 简介 现有的单目3D目标检测方案主要方案主要分为两类,分别为基于图片的方法和基于伪雷达点云的方法。 基于图片的方法一般通过2D-3D之间的几何约束来学习,包括目标形状信息,地面...
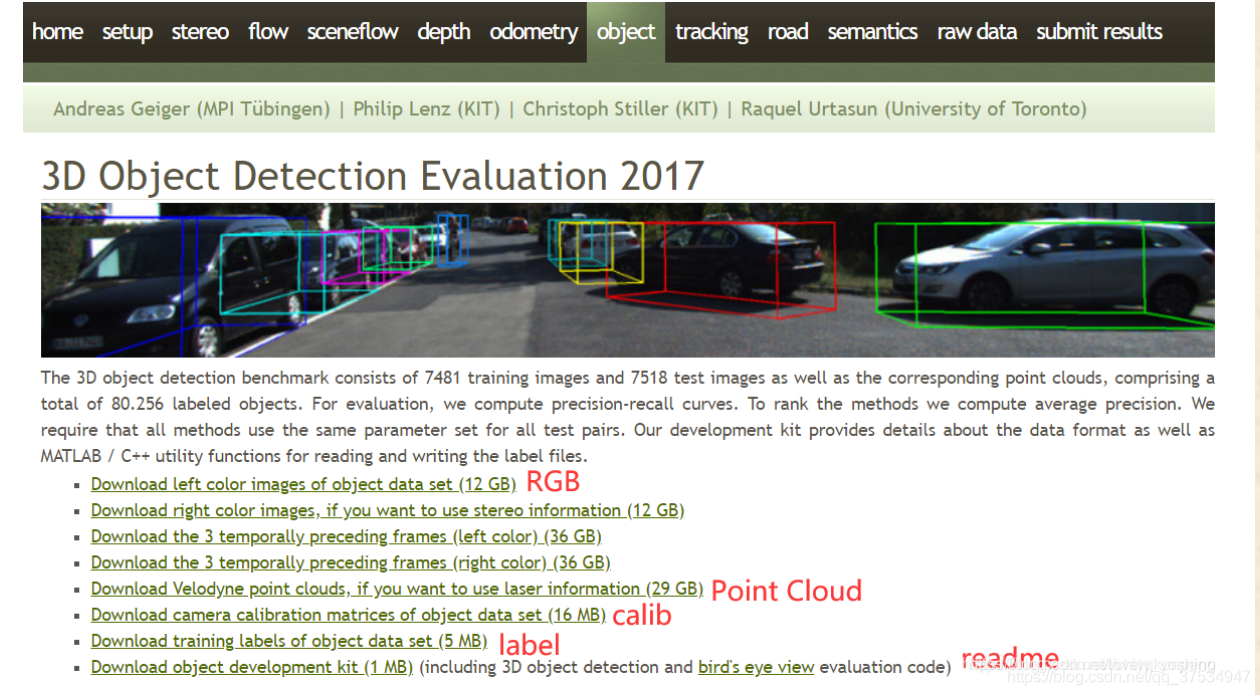
KITTI 3D目标检测数据集入门
标签: php

论文笔记:《Center-based 3D Object Detection and Tracking》
论文Objects as Points ...1、2D目标检测 通过预测目标的中心点keypoint、由于下采样带来的中心点的偏移offset及尺寸size来获取目标的bounding box。 keypoint: 输出二值heatmap,$ \hat{Y}\in [0,1]^{\...
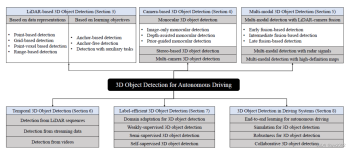
我们将使用RGB图像、RGB-D深度图像和激光点云,输出物体类别及在三维空间中的长宽高、旋转角等信息的检测称为3D目标检测。 多类别目标的检测问题可以转换为“某类物体检测正确、检测错误”的二分类问题,从而可以...
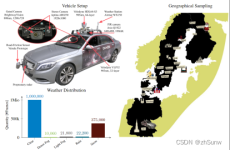
随着自动驾驶与机器人技术的不断发展,基于点云表征的3D目标检测领域在近年来取得了不断的发展。然而,层出不穷的点云数据集(KITTI、NuScene、Lyft、Waymo、PandaSet等)在数据格式与3D坐标系上往往定义各不相同,...
来源:DSGN:基于深度立体几何网络的3D目标检测(香港大学提出) 原文链接:https://arxiv.org/pdf/2001.03398.pdf 主要思想与创新点 大多数最先进的三维目标检测器严重依赖激光雷达传感器。由于在三维场景中的预测...
CenterNet是一个anchor-free的目标检测网络,与YOLOv3相比,精度有所提升,此外他不仅能够用于2D目标检测,也能够用于人体姿态识别,3D目标检测等··· 安装CenterNet 其实安装CenterNet的过程就是一个配置...
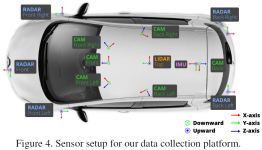
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨安全与...目前基于激光雷达与相机融合的目标感知在高级别自动驾驶汽车的环境感知领域中非常流行,依据传感器到融合中心的数据处理程度从高到低可以划分...


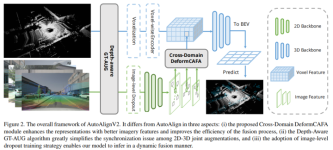
本篇文章主要想对目前处于探索阶段的3D目标检测中多模态融合的方法做一个简单的综述,主要内容为对目前几篇几篇研究工作的总结和对这个研究方面的一些思考。 在前面的一些文章中,笔者已经介绍到了多模态融合的含义...

3D目标检测数据集和算法介绍
标签: 无人驾驶
3D目标检测数据集和算法介绍
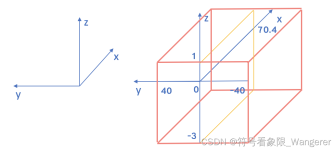
3D目标检测中坐标系详解
标签: 3d
交并比IoU是一种常用的评估目标检测算法性能的指标,本文介绍2D检测框、带旋转的2D检测框和3D检测框交并比的计算,并提供Python实现



Camera-LiDAR based 3D object detection
推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地